Active Volumetric Musculoskeletal Systems
ACM Transactions on Graphics (SIGGRAPH 2014)
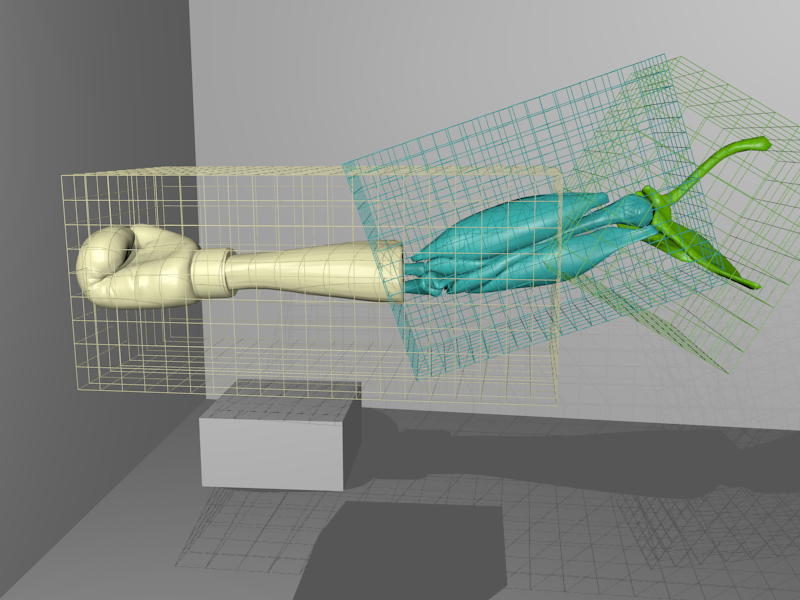
We introduce a new framework for simulating the dynamics of musculoskeletal systems, with volumetric muscles in close contact and a novel data-driven muscle activation model. Muscles are simulated using an Eulerian-on-Lagrangian discretization that handles volume preservation, large deformation, and close contact between adjacent tissues. Volume preservation is crucial for accurately capturing the dynamics of muscles and other biological tissues. We show how to couple the dynamics of soft tissues with Lagrangian multibody dynamics simulators, which are widely available. Our physiologically based muscle activation model utilizes knowledge of the active shapes of muscles, which can be easily obtained from medical imaging data or designed to meet artistic needs. We demonstrate results with models derived from MRI data and models designed for artistic effect.