Standardized Evaluation of Haptic Rendering Systems
Haptics Symposium 2006
225-232
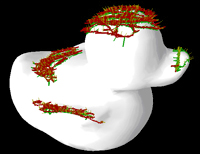
The development and evaluation of haptic rendering algorithms presents two unique challenges. Firstly, the haptic information channel is fundamentally bidirectional,so the output of a haptic environment is fundamentally dependent on user input, which is difficult to reliably reproduce. Additionally, it is difficult to compare haptic results to real-world, “gold standard” results, since such a comparison requires applying identical inputs to real and virtual objects and measuring the resulting forces, which requires hardware that is not widely available. We have addressed these challenges by building and releasing several sets of position and force information, collected by physically scanning a set of real-world objects, along with virtual models of those objects. We demonstrate novel applications of this data set for the development, debugging, optimization, evaluation, and comparison of haptic rendering algorithms.