Eulerian Solid Simulation with Contact
ACM Transactions on Graphics (SIGGRAPH 2011)
36:1 36:10
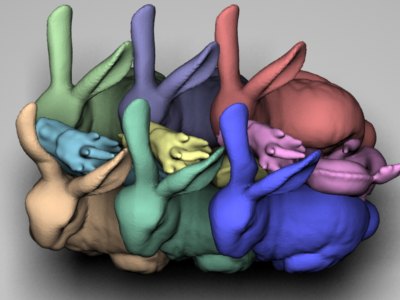
Simulating viscoelastic solids undergoing large, nonlinear deformations in close contact is challenging. In addition to inter-object contact, methods relying on Lagrangian discretizations must handle degenerate cases by explicitly remeshing or resampling the object. Eulerian methods, which discretize space itself, provide an interesting alternative due to the fixed nature of the discretization. In this paper we present a new Eulerian method for viscoelastic materials that features a collision detection and resolution scheme which does not require explicit surface tracking to achieve accurate collision response. Time-stepping with contact is performed by the efficient solution of large sparse quadratic programs; this avoids constraint sticking and other difficulties. Simulation and collision processing can share the same uniform grid, making the algorithm easy to parallelize. We demonstrate an implementation of all the steps of the algorithm on the GPU. The method is effective for simulation of complicated contact scenarios involving multiple highly deformable objects, and can directly simulate volumetric models obtained from medical imaging techniques such as CT and MRI.