
Projects and Publications home page
| by date: |
|
2023
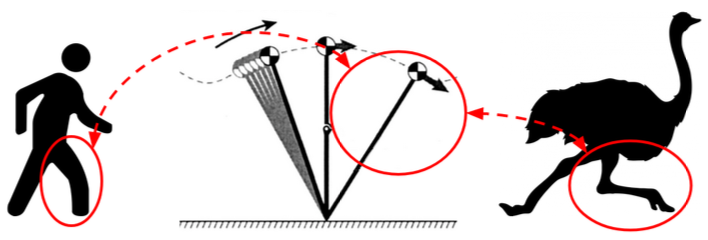
Physical Simulation of Balance Recovery after a Push
Alexis Jensen, Thomas Chatagnon, Niloofar Khoshsiyar, Daniele Reda, Michiel van de Panne, Charles Pontonnier, Julien Pettre
MIG 2023, appearing in: Proceedings of the 16th ACM SIGGRAPH Conference on Motion, Interaction and Games
Paper video; ACM Digital Library

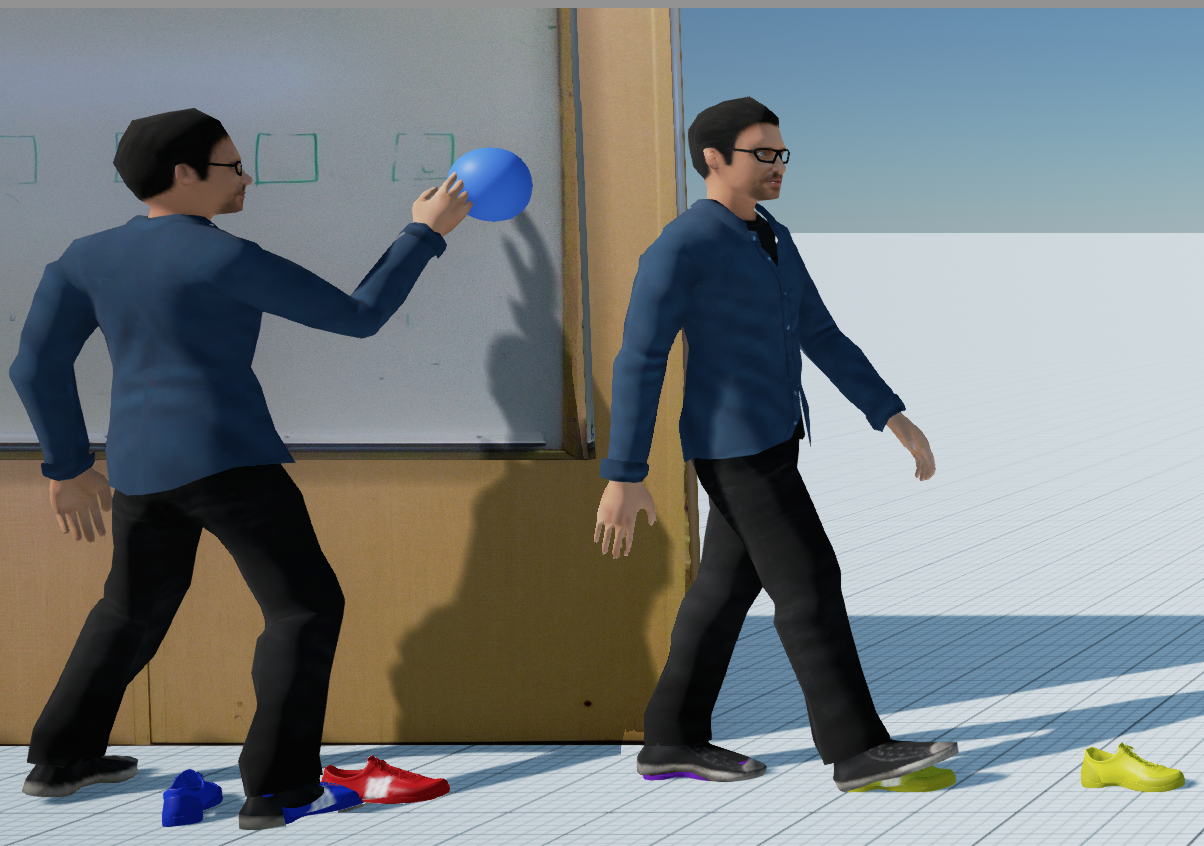
Physics-based Motion Retargeting from Sparse Inputs
Daniele Reda, Jungdam Won, Yuting Ye, Michiel van de Panne, Alexander Winkler
SCA 2023, appearing in: Proceedings of the ACM on Computer Graphics and Interactive Techniques, Volume 6 Issue 3
project page Paper (arXiv) Video (YouTube) ACM Digital Library

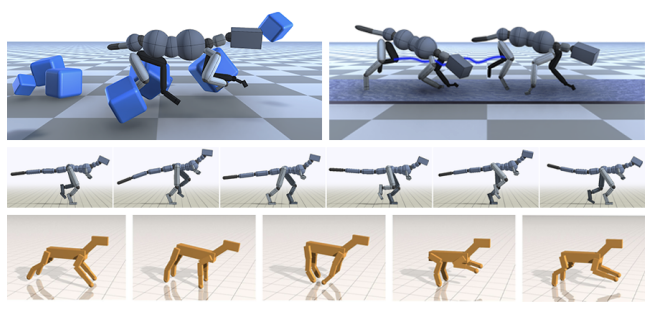
Hierarchical Planning and Control for Box Loco-Manipulation
Zhaoming Xie, Jonathan Tseng, Sebastian Starke, Michiel van de Panne, C Karen Liu
SCA 2023, appearing in: Proceedings of the ACM on Computer Graphics and Interactive Techniques, Volume 6 Issue 3
Paper (PDF) Video (YouTube) Code ACM Digital Library
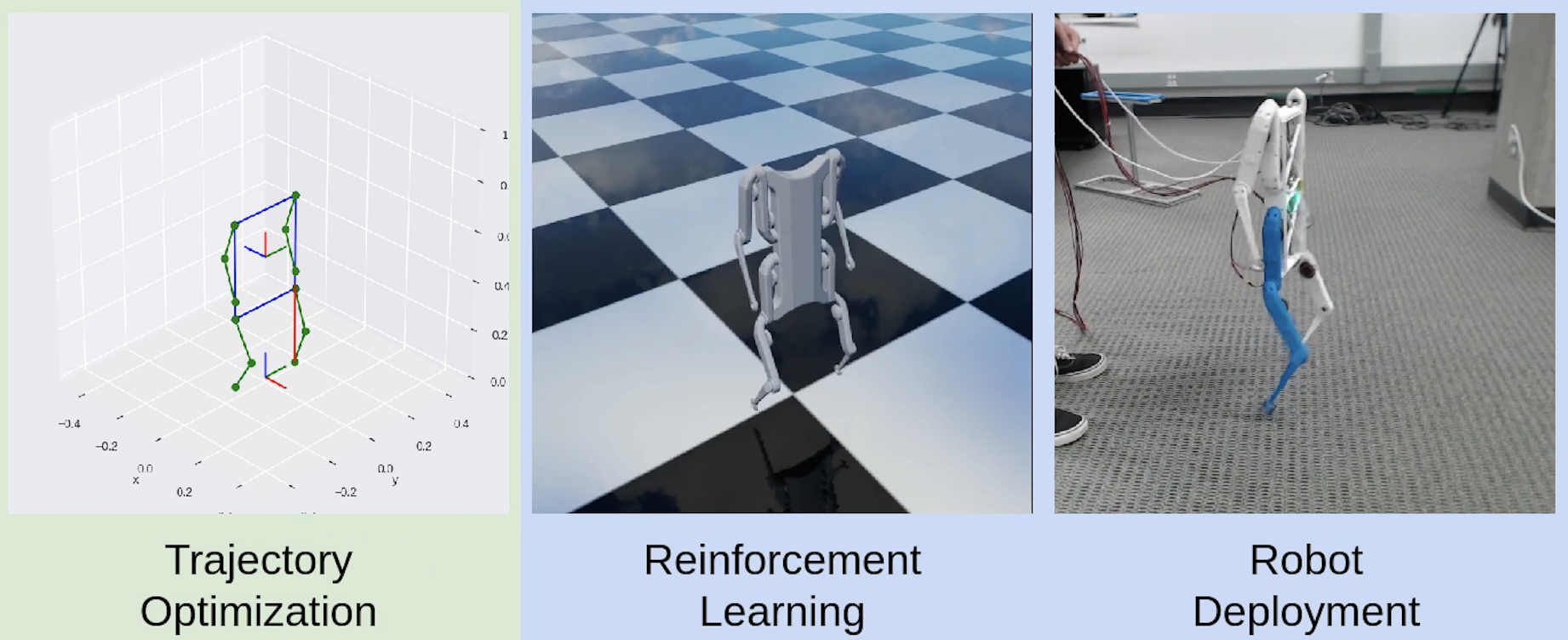
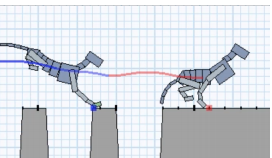
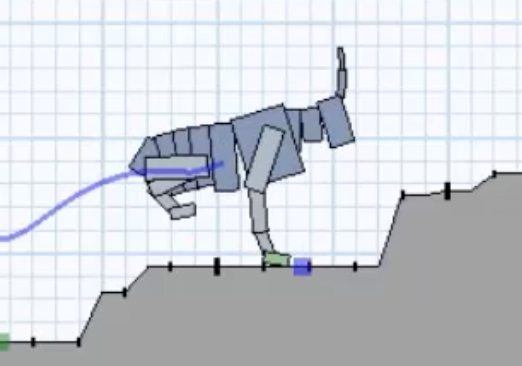
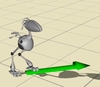
OPT-Mimic: Imitation of Optimized Trajectories for Dynamic Quadruped Behaviors
Yuni Fuchioka, Zhaoming Xie, Michiel van de Panne
IEEE International Conference on Robotics and Automation (ICRA 2023)
project page
2022
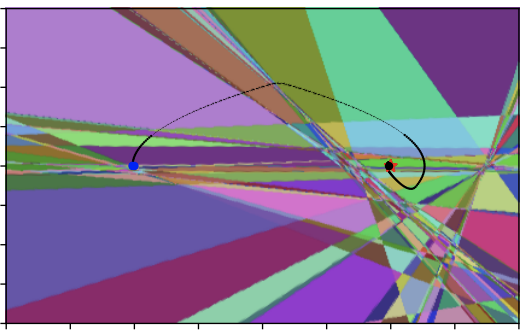
Understanding the Evolution of Linear Regions in Deep Reinforcement Learning
Setareh Cohan, Nam Hee Kim, David Rolnick, Michiel van de Panne
NeurIPS 2022
arXiv project page Code
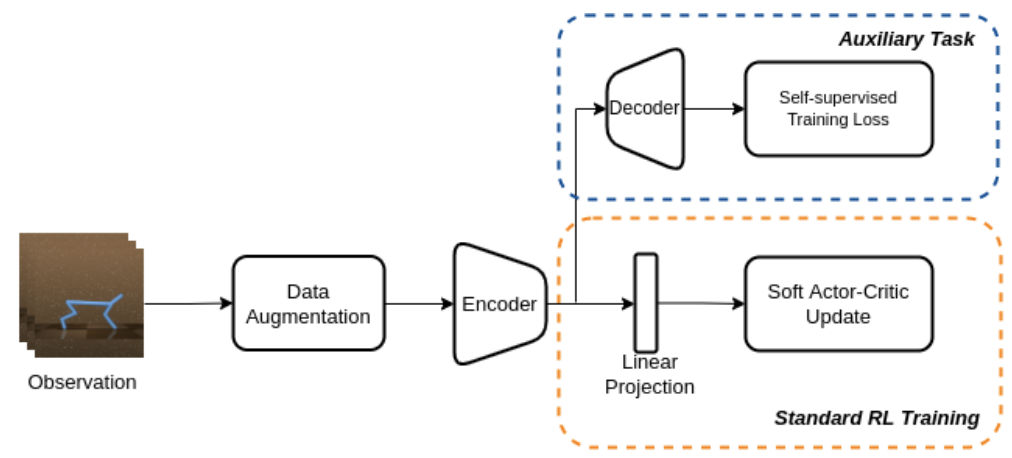
Evaluating Vision Transformer Methods for Deep Reinforcement Learning from Pixels
Tianxin Tao, Daniele Reda, Michiel van de Panne
ICRA 2022 Workshop on Scalable Robot Learning
arXiV

Learning Soccer Juggling Skills with Layer-wise Mixture-of-Experts
Zhaoming Xie, Sebastian Starke, Hung Yu Ling, Michiel van de Panne
ACM SIGGRAPH 2022
project page
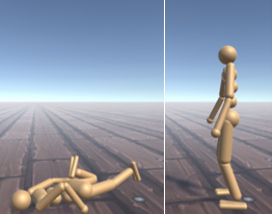
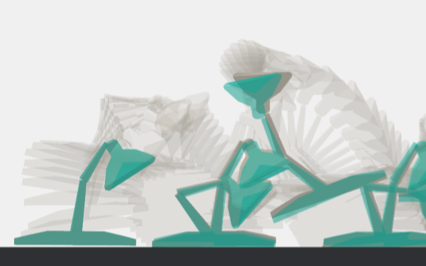
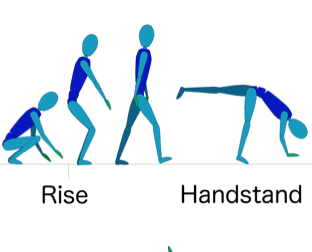
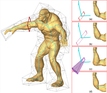
Learning to Get Up
Tianxin Tao, Matthew Wilson, Ruiyu Gou, Michiel van de Panne
ACM SIGGRAPH 2022
project page
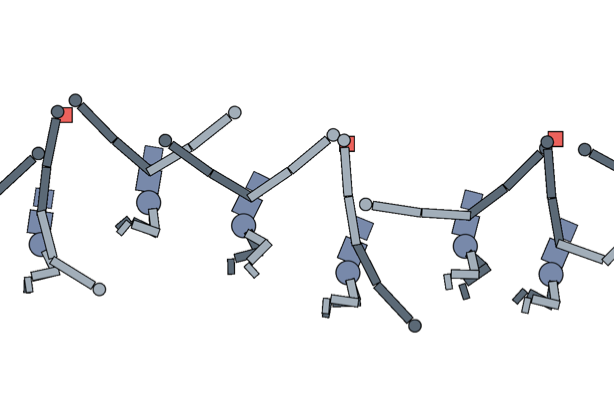
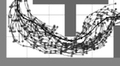
Learning to Brachiate via Simplified Model Imitation
Daniele Reda(*), Hung Yu Ling(*), Michiel van de Panne
ACM SIGGRAPH 2022
project page
Style-erd: Responsive and coherent online motion style transfer
Tianxin Tao, Xiaohang Zhan, Zhongquan Chen, and Michiel van de Panne
IEEE / CVF Computer Vision and Pattern Recognition Conference (CVPR), 2022.
project page
A Survey on Reinforcement Learning Methods in Character Animation
Ariel Kwiatkowski, Eduardo Alvarado, Vicky Kalogeiton, C Karen Liu, Julien Pettre, Michiel van de Panne, Marie-Paule Cani
Computer Graphics Forum, 41(2), 2022, p613-639
2021
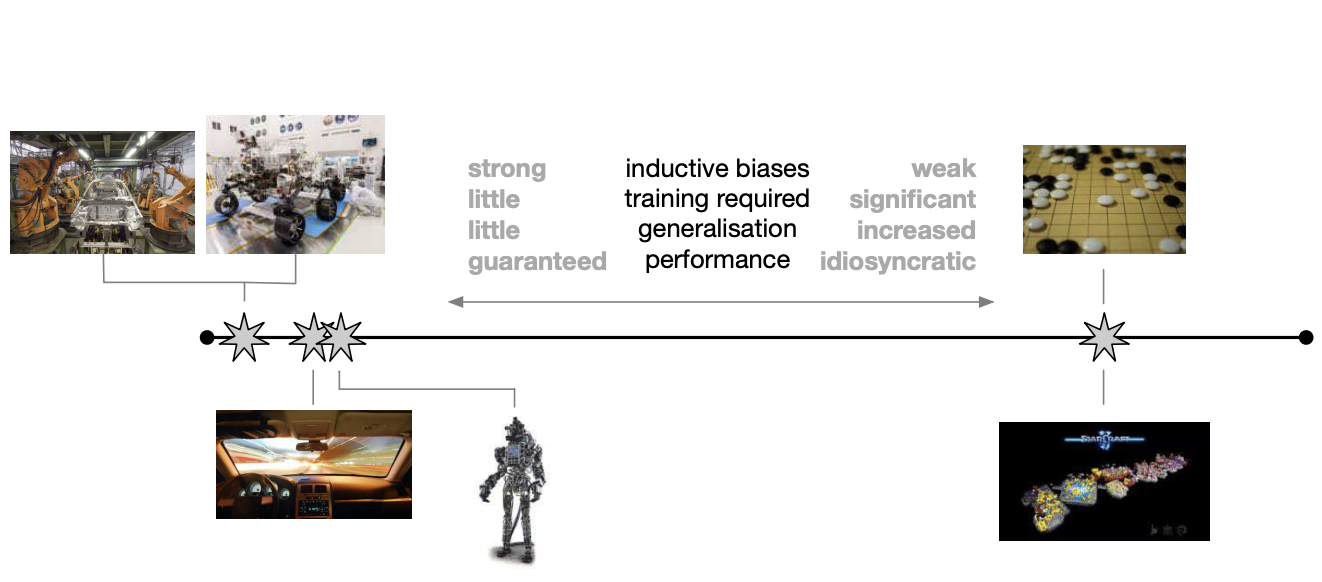
From machine learning to robotics: Challenges and opportunities for embodied intelligence
Nicholas Roy, Ingmar Posner, Tim Barfoot, Philippe Beaudoin, Yoshua Bengio, Jeannette Bohg, Oliver Brock, Isabelle Depatie, Dieter Fox, Dan Koditschek, Tomas Lozano-Perez, Vikash Mansinghka, Christopher Pal, Blake Richards, Dorsa Sadigh, Stefan Schaal, Gaurav Sukhatme, Denis Therien, Marc Toussaint, Michiel Van de Panne
https://arxiv.org/abs/2110.15245
Flexible Motion Optimization with Modulated Assistive Forces
Nam Hee Kim, Hung Yu Ling, Zhaoming Xie, Michiel van de Panne
ACM SIGGRAPH / Eurographics Symposium on Computer Animation 2021,
appearing in: PACM on Computer Graphics and Interactive Techniques
project page
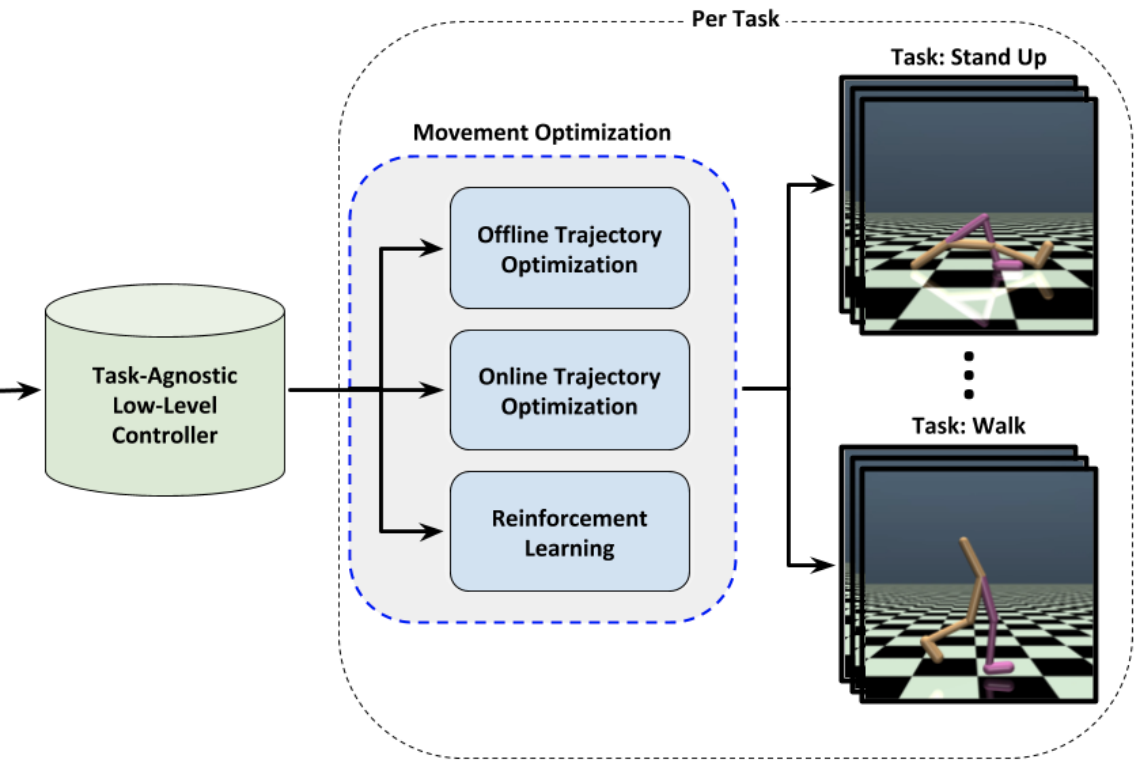
Learning Task-Agnostic Action Spaces for Movement Optimization
Amin Babadi, Michiel van de Panne, C. Karen Liu, Perttu Hämäläinen
IEEE Transactions on Computer Graphics and Visualization
IEEE Open Access arXiv (combined PDF) YouTube video project page
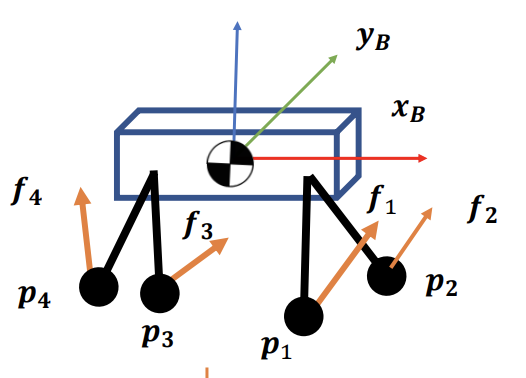
GLiDE: Generalizable Quadrupedal Locomotion in Diverse Environments with a Centroidal Model
Zhaoming Xie, Xingye Da, Buck Babich, Animesh Garg, and Michiel van de Panne
In 15th International Workshop on the Algorithmic Foundations of Robotics (WAFR). 2022.
arXiv
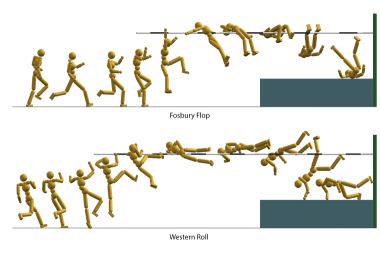
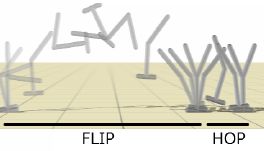
Discovering Diverse Athletic Jumping Strategies
Zhiqi Yin, Zeshi Yang, Michiel van de Panne, KangKang Yin
ACM Transactions on Graphics (Proc SIGGRAPH 2021, to appear)
arXiv project page
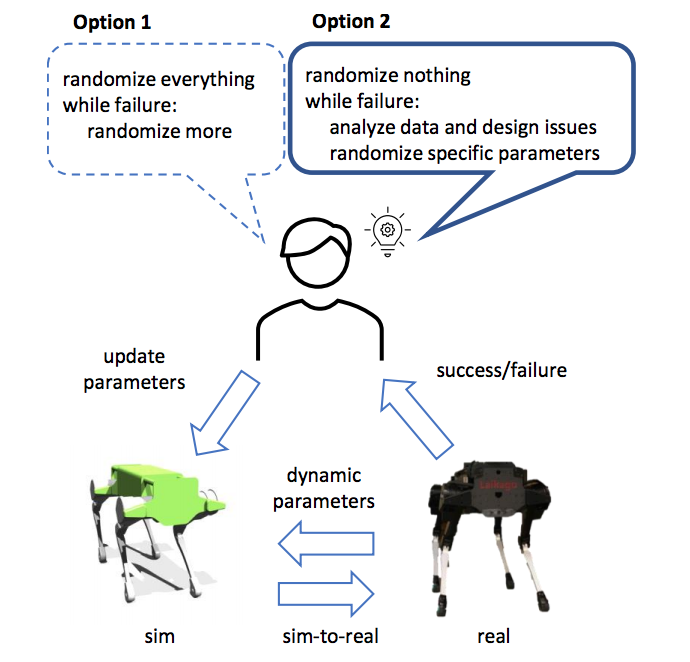
Dynamics Randomization Revisited: A Case Study for Quadrupedal Locomotion
Zhaoming Xie, Xingye Da, Michiel van de Panne, Buck Babich and Animesh Garg
IEEE International Conference on Robotics and Automation (ICRA 2021)
arXiv project page
2020
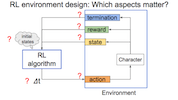
Learning to Locomote: Understanding How Environment Design Matters for Deep Reinforcement Learning
Daniele Reda, Tianxin Tao, Michiel van de Panne
ACM SIGGRAPH Motion, Interaction and Games (MIG 2020)
project page
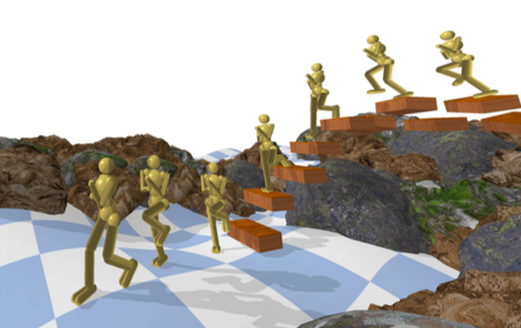
ALLSTEPS: Curriculum-driven Learning of Stepping Stone Skills
Zhaoming Xie, Hung Yu Ling, Nam Hee Kim, Michiel van de Panne
ACM SIGGRAPH / Eurographics Symposium on Computer Animation 2020
Best Paper Award project page

Fast and Flexible Multilegged Locomotion Using Learned Centroidal Dynamics
Taesoo Kwon, Yoonsang Lee, Michiel van de Panne
ACM Transactions on Graphics (Proc. SIGGRAPH 2020)
project page
Character Controllers using Motion VAEs
Hung Yu Ling, Fabio Zinno, George Cheng, Michiel van de Panne
ACM Transactions on Graphics (Proc. SIGGRAPH 2020)
project page
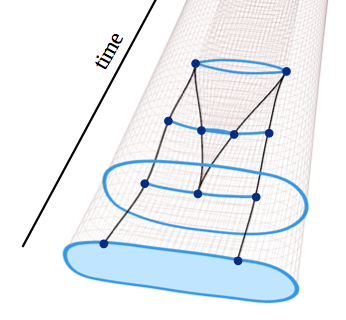
Learning to correspond dynamical systems
Nam Hee Kim, Zhaoming Xie, Michiel van de Panne
Proceedings of Machine Learning Research (Learning for Dynamics and Control 2020) (L4DC)
project page
2019

Learning Locomotion Skills for Cassie: Iterative Design and Sim-to-Real
Zhaoming Xie, Patrick Clary, Jeremy Dao, Pedro Morais, Jonathan Hurst, Michiel van de Panne
Conference on Robot Learning (CORL 2019)
project page
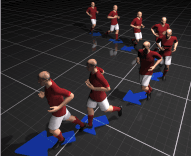
On Learning Symmetric Locomotion
Farzad Abdolhosseini, Hung Yu Ling, Zhaoming Xie, Xue Bin Peng, Michiel van de Panne
ACM SIGGRAPH Motion, Interaction, and Games 2019 (MIG 2019)
Also: NeurIPS 2019 Deep Reinforcement Learning workshop.
project page
2018
Terrain RL Sim
Glen Berseth, Xue Bin Peng, Michiel van de Panne
We provide a simulation codebase for 88 challenging simulation environments, which include randomized terrains and egocentric perception of the terrains. The API closely follows the openAIGym style.
project page
Data-driven Autocompletion for Keyframe Animation
Xinyi Zhang, Michiel van de Panne Best Paper Award
Motion, Interaction, and Games 2018 (MIG 2018)
project page
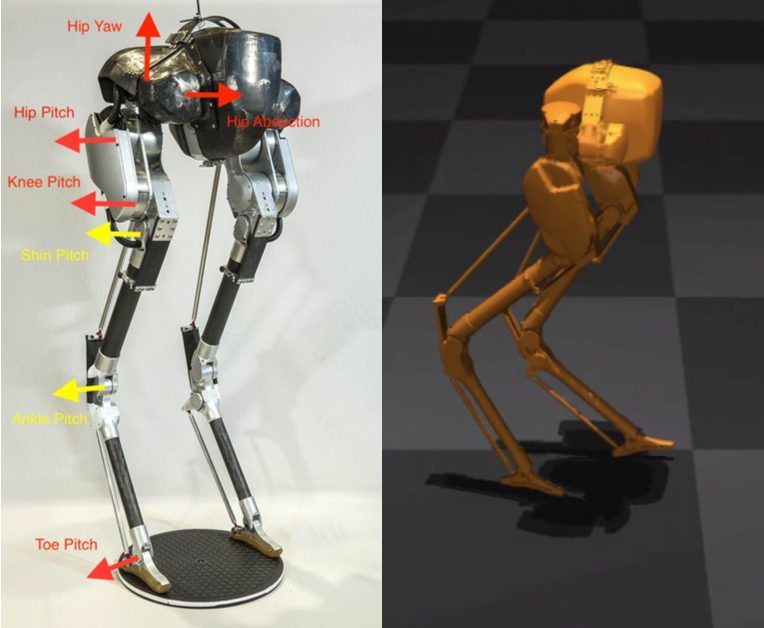
Feedback Control for Cassie with Deep Reinforcement Learning
Zhaoming Xie, Glen Berseth, Patrick Clary, Jonathan Hurst, Michiel van de Panne
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2018)
project page
Model-Based Action Exploration for Learning Dynamic Motion Skills
Glen Berseth, Alex Kyriazis, Ivan Zinin, William Choi, Michiel van de Panne
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2018)
project page

DeepMimic: Example-Guided Deep Reinforcement Learning of Physics-Based Character Skills
Xue Bin Peng, Pieter Abbeel, Sergey Levine, Michiel van de Panne
ACM Transactions on Graphics (Proc. SIGGRAPH 2018)
project page
Progressive Reinforcement Learning with Distillation for Multi-Skilled Motion Control
Glen Berseth, Cheng Xie, Paul Cernek, Michiel van de Panne
International Conference on Learning Representations (ICLR 2018)
project page
Simulation for Control
KangKang Yin, Libin Liu, Michiel van de Panne
In Humanoid Robotics: A Reference Ambarish Goswami and Prahlad Vadakkepat (eds), 2018, Springer
(awaiting print)
Biped Controllers for Character Animation
KangKang Yin, Stelian Coros, Michiel van de Panne
In Handbook of Human Motion Bertram Muller and Sebastian Wolf (eds), 2018, Springer
(awaiting print)
2017
Learning Locomotion Skills Using DeepRL: Does the Choice of Action Space Matter?
Xue Bin Peng, Michiel van de Panne Best Student Paper Award
ACM SIGGRAPH / Eurographics Symposium on Computer Animation 2017
project page
DeepLoco: Dynamic Locomotion Skills Using Hierarchical Deep Reinforcement Learning
Xue Bin Peng, Glen Berseth, KangKang Yin, Michiel van de Panne
ACM Transactions on Graphics (Proc. SIGGRAPH 2017)
project page
Domain of Attraction Expansion for Physics-Based Character Control
Mazen Al Borno, Michiel Van De Panne, Eugene Fiume
ACM Transactions on Graphics, Volume 36 Issue 2, April 2017, Article 17
2016
Terrain-Adaptive Locomotion Skills Using Deep Reinforcement Learning
Xue Bin Peng, Glen Berseth, Michiel van de Panne
ACM Transactions on Graphics (Proc. SIGGRAPH 2016)
Additional non-archival presentations at Dynamic Walking 2016 and NIPS 2016 Deep Learning Symposium 2016
project page
Shailen Agrawal, Michiel van de Panne
ACM Transactions on Graphics (Proc. SIGGRAPH 2016)
project page
Libin Liu, Michiel van de Panne, KangKang Yin
ACM Transactions on Graphics (presented at SIGGRAPH 2016)
project page

Amir Rabbani, Michiel van de Panne, Paul Kry
Computer Animation and Virtual Worlds
paper
2015
Learning Reduced-Order Feedback Policies for Motion Skills
Kai Ding, Libin Liu, Michiel van de Panne, KangKang Yin
ACM SIGGRAPH / Eurographics Symposium on Computer Animation 2015 Best paper
project page
Dynamic Terrain Traversal Skills Using Reinforcement Learning
Xue Bin Peng, Glen Berseth, Michiel van de Panne
ACM Transactions on Graphics (Proc. SIGGRAPH 2015)
Additional non-archival presentations of this work to be given at Dynamic Walking 2015 RLDM 2015
project page
Vector Graphics Animation with Time-Varying Topology
Boris Dalstein, Rémi Ronfard, Michiel van de Panne
ACM Transactions on Graphics (Proc. SIGGRAPH 2015)
project page
Controller Design for Multiskilled Bipedal Characters
Michael Firmin, Michiel van de Panne
Computer Graphics Forum
project page
2014
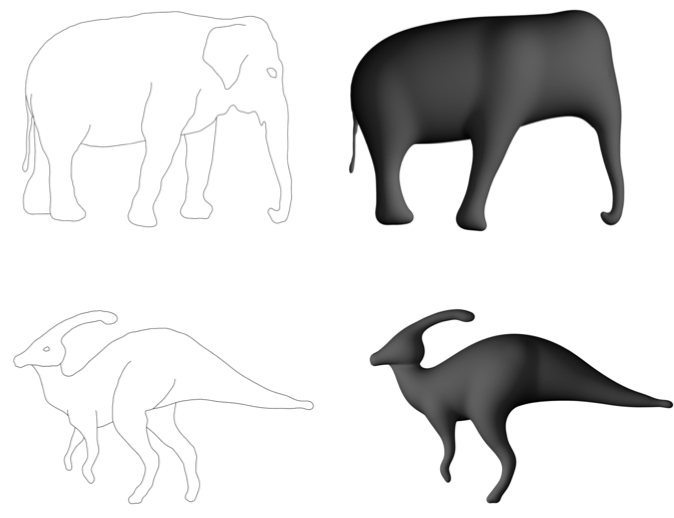
Modeling 3D Animals from a Side-view Sketch
Even Entem, Loic Barthe, Marie-Paule Cani, Frederic Cordier, Michiel van de Panne
Computers & Graphics, Special Issue on Shape Modeling International 2014
project page
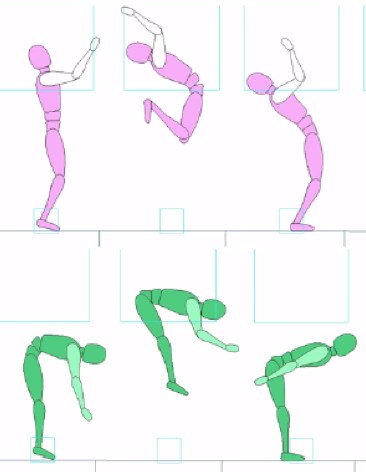
Anticipatory Balance Control
Amir H. Rabbani, Michiel van de Panne, Paul G. Kry
ACM SIGGRAPH Motion in Games 2014
project page
Vector Graphics Complexes
Boris Dalstein, Remi Ronfard, Michiel van de Panne
ACM Transactions on Graphics (Proc. SIGGRAPH 2014)
project page

Poster: Towards a Control Language for Authoring Humanoid Motions
Michael Firmin, Michiel van de Panne
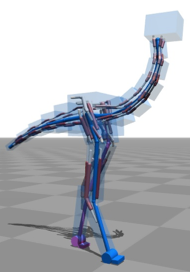
Talk: Optimizing Muscle Routing and Control for Diverse Morphologies
Thomas Geijtenbeek, Michiel van de Panne, A.F. van der Stappen, F.C.T. van der Helm
Motion fields for interactive character animation: technical perspective
Communications of the ACM Research highlights
Michiel van de Panne
article (one page)

Diverse Motions and Character Shapes for Simulated Skills
IEEE Transactions on Visualization and Computer Graphics
Shailen Agrawal, Shuo Shen, Michiel van de Panne (30%+ extended version of SCA 2013 paper)
preprint Official version
2013

Pareto Optimal Control for Natural and Supernatural Motions
Shailen Agrawal, Michiel van de Panne
Motion in Games (MIG 2013) Best paper
project page
Flexible Muscle-Based Locomotion for Bipedal Creatures
Thomas Geijtenbeek, Michiel van de Panne, A. Frank van der Stappen
ACM Transactions on Graphics (Proc. SIGGRAPH ASIA 2013)
project page
Diverse Motion Variations for Physics-based Character Animation
Shailen Agrawal, Shuo Shen, Michiel van de Panne
Symposium on Computer Animation (SCA 2013) Best paper honorable mention
project page
2012

Terrain Runner: Control, Parameterization, Composition, and Planning for Highly Dynamic Motions
Libin Liu, KangKang Yin, Michiel van de Panne, Baining Guo
ACM Transactions on Graphics (Proc. SIGGRAPH ASIA 2012)
project page
Curriculum Learning for Motor Skills
Andrej Karpathy, Michiel van de Panne
Proceedings of AI 2012
project page

IEEE TVCG Special Section on the ACM SIGGRAPH/Eurographics Symposium on Computer Animation
Adam Bargteil and Michiel van de Panne (guest editors)
IEEE TVCG issue and guest editor's introduction, Aug 2012, Volume 18, Number 8
2011
Proceedings of ACM/Eurographics Symposium on Computer Animation 2011, Vancouver, Canada, Aug 5-7 2011
Adam Bargteil and Michiel van de Panne (program co-chairs and proceedings editors)

Displacement Interpolation Using Lagrangian Mass Transport
Nicolas Bonneel, Michiel van de Panne, Sylvain Paris, Wolfgang Heidrich
ACM Transactions on Graphics (Proc. ACM SIGGRAPH ASIA 2011).
project web page
This paper describes a generic method for interpolating between pairs of functions or distributions using mass transport methods.
The method copes well with features that exhibit translational motion between examplars, unlike interpolation schemes that use linearly-weighted mixtures.

Locomotion Skills for Simulated Quadrupeds
Stelian Coros, Andrej Karpathy, Benjamin Jones, Lionel Reveret, Michiel van de Panne
ACM Transactions on Graphics (Proc. ACM SIGGRAPH 2011).
project web page
2010

Proxy-Guided Texture Synthesis for Rendering Natural Scenes
Nicolas Bonneel, Michiel van de Panne, Sylvain Lefebvre, George Drettakis
VMV 2010: Vision, Modeling, and Visualization Best Paper Award (82 submissions, 43 accepted).
pdf additional material YouTube video

Generalized Biped Walking Control
Stelian Coros, Philippe Beaudoin, Michiel van de Panne
ACM Transactions on Graphics (Proc. ACM SIGGRAPH 2010).
project web page

Sampling-based Contact-rich Motion Control
Libin Liu, KangKang Yin, Michiel van de Panne, Tianjia Shao, Weiwei Xu
ACM Transactions on Graphics (Proc. ACM SIGGRAPH 2010).
project web page

Flexible Isosurfaces: Simplifying and Displaying Scalar Topology Using the Contour Tree
Hamish Carr, Jack Snoeyink, Michiel van de Panne
Computational Geometry, 43(1), 2010, p. 42-58
2009
Robust Task-based Control Policies for Physics-based Characters
Stelian Coros, Philippe Beaudoin, Michiel van de Panne
ACM Transactions on Graphics (Proc. ACM SIGGRAPH ASIA 2009).
project web page code for SIMBICON controller editor and simulation

Joint-aware Manipulation of Deformable Models
Weiwei Xu, Jun Wang, KangKang Yin, Kun Zhou, Michiel van de Panne, Falai Chen, Baining Guo
ACM Transactions on Graphics (Proc. ACM SIGGRAPH 2009).
PDF video

Modeling from Contour Drawings
Vladislav Kraevoy, Alla Sheffer, Michiel van de Panne
Eurographics/ACM Symposium on Sketch-Based Interfaces and Modeling 2009
PDF (10 Mb) video MOV (135 Mb)

Single Photo Estimation of Hair Appearance
Nicolas Bonneel, Sylvain Paris, Michiel van de Panne, Fredo Durand, George Drettakis
Computer Graphics Forum (Proc. Eurographics Symposium on Rendering 2009)
PDF video
2008
Reusable Skinning Templates Using Cage-based Deformations
Tao Ju, Qian-Yi Zhou, Michiel van de Panne, Danny Cohen-Or, Ulrich Neumann
ACM Transactions on Graphics (Proc. ACM SIGGRAPH ASIA 2008).
PDF (10 pages, 9.3 Mb) video

Synthesis of Constrained Walking Skills
Stelian Coros, Philippe Beaudoin, KangKang Yin, and Michiel van de Panne.
ACM Transactions on Graphics (Proc. ACM SIGGRAPH ASIA 2008).
project page

Continuation Methods for Adapting Simulated Skills
KangKang Yin, Stelian Coros, Philippe Beaudoin, Michiel van de Panne
ACM Transactions on Graphics (Proc. ACM SIGGRAPH 2008)
project page PDF (7 pages, 3.2 Mb) video (37 Mb)

Motion-Motif Graphs.
Philippe Beaudoin, Michiel van de Panne, Pierre Poulin and Stelian Coros.
ACM/EG Symposium on Computer Animation 2008.
PDF (10 pages, 1.3 MB) video (30 MB) PDF of Large Graph (200 Kb)
2007 tech report PDF (11 pages, 1.9 MB) 2007 tech report AVI (42 MB)
2007

SIMBICON: Simple Biped Locomotion Control
KangKang Yin, Kevin Loken, and Michiel van de Panne
ACM Transactions on Graphics (Proc. ACM SIGGRAPH 2007)
project page PDF (10 pages, 0.8 Mb) JSIMBICON Java Applet
videos: overview drunk walk hill slip box trip spin walk high-to-low gravity hills limping

Adapting Wavelet Compression to Human Motion Capture Clips
Philippe Beaudoin, Pierre Poulin, and Michiel van de Panne.
Graphics Interface 2007
PDF (6 pages, 0.8 MB) video (AVI, 37 MB)
Faster Motion Planning Using Learned Local Viability Models
Maciej Kalisiak and Michiel van de Panne.
ICRA 2007: IEEE International Conference on Robotics and Automation
project page PDF (6 pages, 1 Mb)
2006

Constellation Models for Sketch Recognition
Dana Sharon and Michiel van de Panne.
Eurographics Workshop on Sketch Based Interfaces and Modeling 2006
PDF (8 pages, 1.6 Mb)

"Walk to here": A Voice-Driven Animation System
Zhijin Wang and Michiel van de Panne.
SCA 2006: SIGGRAPH/EG Symposium on Computer Animation
PDF (9 pages, 4.3 Mb) video (AVI, 50 Mb)
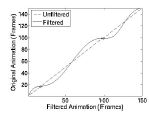
Slow-in and Slow-out Cartoon Animation Filter
David White, Kevin Loken, and Michiel van de Panne.
Poster, ACM SIGGRAPH 2006
PDF (1 pages, 0.2 Mb) video (MOV, 18 MB)
RRT-blossom: RRT with a local flood-fill behavior
Maciej Kalisiak and Michiel van de Panne.
ICRA 2006: IEEE International Conference on Robotics and Automation
PDF (7 pages, 0.5 Mb) project page
2005
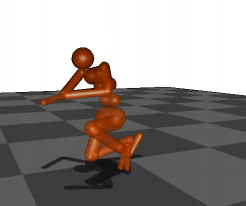
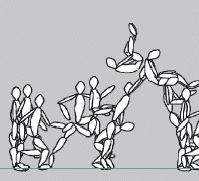
Data-driven Interactive Balancing Behaviors
Motion capture data is kinematic in nature. How can we build models of motions that allow us to interact with characters using forces? This work applies a data-driven approach to computing appropriate responses for a character that is being pushed.
-
KangKang Yin, Dinesh K. Pai, and Michiel van de Panne.
Data-driven Interactive Balancing Behaviors.
Pacific Graphics 2005 (short paper), Oct 12-14, Macao
full paper: PDF (9 pages, 1 Mb) video: 2005-pg-balance.wmv
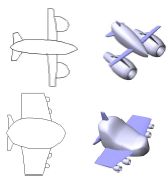
Sketch-based Modeling of Parameterized Objects
Sketch-based modeling holds the promise of making 3D modeling accessible to a signicantly wider audience than current modeling tools. We present a modeling system that is capable of constructing 3D models of particular object classes from 2D sketches. The core of the system is a sketch recognition algorithm that seeks to match the points and curves of a set of given 2D templates to the sketch. The system builds models of cups and mugs, airplanes, and fish from sketches.
- Chen Yang, Dana Sharon, and Michiel van de Panne.
Sketch-based Modeling of Parameterized Objects.
accepted to: 2nd Eurographics Workshop on Sketch-Based Interfaces and Modeling, Dublin, August 28-29, 2005.
paper: PDF (10 pages, 3.1 Mb) video: Quicktime (10Mb) - Chen Yang, Dana Sharon, and Michiel van de Panne.
Sketch-based Modeling of Parameterized Objects.
ACM SIGGRAPH 2005 Technical Sketch, Los Angeles, July 31-Aug 4, 2005.
paper: PDF (1 page, 1.4 Mb)
Many planning algorithms for steering assume the existence of a complete model of the world. In this project, we construct reactive steering behaviours which use only a simple set of four distance measurements in order to guide the steering. We construct reactive policies for steering cars and trucks-with-trailer forwards and backwards through constrained winding tracks.
- Ken Alton and Michiel van de Panne
Learning to Steer on Winding Tracks Using Semi-Parametric Control Policies.
ICRA 2005: International Conference on Robotics and Automation, Barcelonia, Spain, April 18-22, 2005.
project page
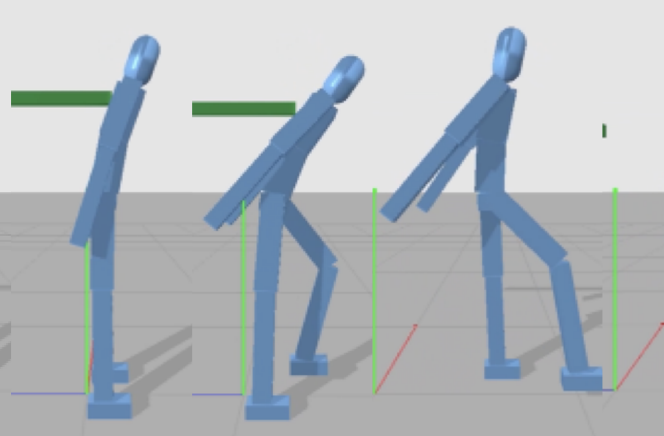
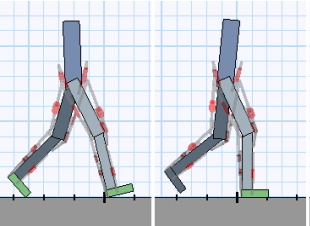
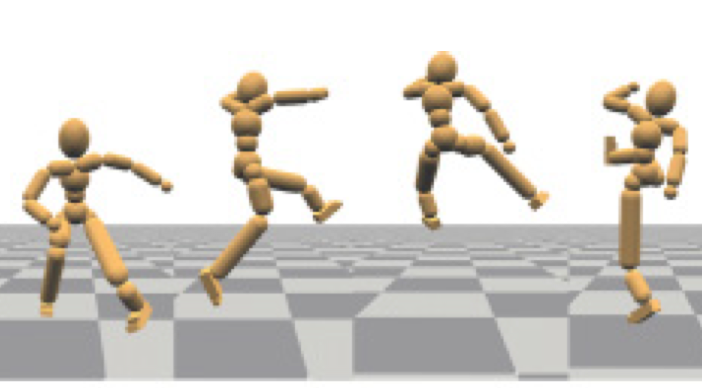
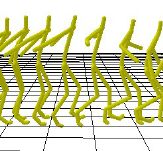
Successful walking requires the careful control of balance throughout the motion. Developing feedback-based control strategies for physics-based walking simulations is surprisingly difficult. Given a key-framed animation that describes a desired style of walk, we learn a control policy that satisfies the competing goals of both imitating the desired style and maintaining balance.
- Dana Sharon and Michiel van de Panne
Synthesis of Controllers for Stylized Planar Bipedal Walking.
ICRA 2005: International Conference on Robotics and Automation. Barcelonia, Spain, April 18-22, 2005.
paper: PDF (226 kb)
animations: flat terrain, funky walk, weird walk, bumpy terrain, changed character
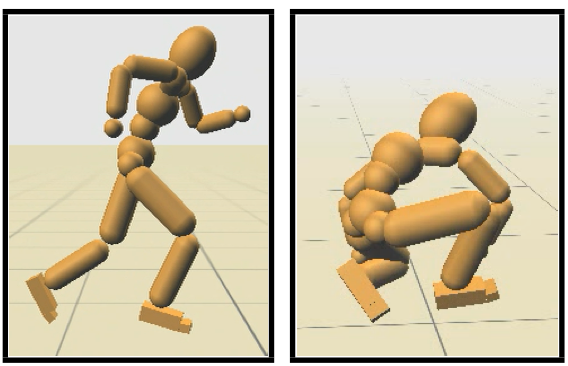
A major challenge in creating physics-based animation is that of solving for the required control to achieve desired behaviours, especially for complex models such as humans and many animals. We propose two interfaces which let a user or game-player interactively control the motions of 3D multi-link rigid body simulations of aerial motions such as diving, ski jumping, and snowboarding.
- Peng Zhao and Michiel van de Panne
User Interfaces for Interactive Control of Physics-based 3D Characters.
I3D: ACM SIGGRAPH 2005 Symposium on Interactive 3D Graphics and Games. Washington, U.S.A., April 3-5 2005.
paper: PDF (1124 kb)
animations: gamepad control , animation palette demo, animation palette results
2004
Matthew Thorne, David Burke, and Michiel van de Panne,
ACM Transactions on Graphics, 23(3), Proceedings of SIGGRAPH 2004.
project page

The human visual system is not a camera, which creates the potential to manipulate images and animations in convenient, imperceptible ways. Examples of this include the representation of colour (using RGB instead of a spectral distribution) and the choice of frame-rate for displaying animations. In this project we ask other basic questions such as "To what extent can one change the length of objects during an animated motion without this being observed? How does the user's attention affect this result?".
- Jason Harrison, Ron Rensink, and Michiel van de Panne,
Obscuring Length Changes During Animated Motion.
ACM Transactions on Graphics, 23(3), Proceedings of SIGGRAPH 2004.
paper: PDF (2.4 Mb)
animations: video MP4 (15 Mb) - Jason Harrison, Ron Rensink, and Michiel van de Panne,
Length changes are difficult but not impossible to detect without attention. (abstract)
Vision Sciences Society , April 30-May 5, 2004, Journal of Vision - Jason Harrison, Ron Rensink, and Michiel van de Panne.
Detecting changes of velocity of smoothly moving objects. (abstract)
Vision Sciences Society , May 9-14, 2003, Journal of Vision, 3: 401a.

The contour tree is an abstraction that encodes the nesting relationships of isosurfaces. It can be used to accelerate isosurface extraction, to identify important isovalues for volume rendering transfer functions, and to guide exploratory visualization through a flexible isosurface interface.
- Hamish Carr, Jack Snoeyink, and Michiel van de Panne,
Contour Tree Simplification With Local Geometric Measures.
14th Annual Fall Workshop on Computational Geometry, Nov 19-20, 2004, MIT. - Hamish Carr, Jack Snoeyink, and Michiel van de Panne,
Simplifying Flexible Isosurfaces Using Local Geometric Measures. PDF (618 kb)
IEEE Visualization 2004
The viability envelope consists of all points of no return where a system will inevitably succumb to failure, such as a car heading towards a wall or obstacle. We present a method for computing an explicit model of the viability envelope and using this to automatically constrain a users steering behaviour to that which allows maximum freedom while guaranteeing that failure cannot occur.
- Maciej Kalisiak and Michiel van de Panne,
Approximate Safety Enforcement Using Computed Viability Envelopes.
IEEE International Conference on Robotics and Animation, 2004.
2003
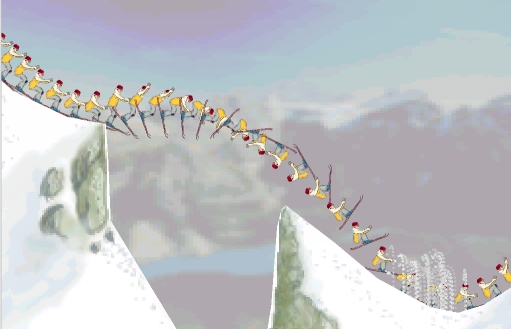
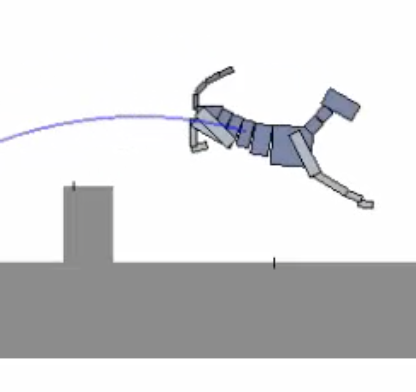
Ski Stunt Simulator project web page and download
This project implements a realistic planar simulation of the physics involved in performing acrobatic ski stunts. The pose of the skier can be interactively controlled with the mouse. Thus performing any given stunt requires the right combination of both physics and skill, as in real life. A large variety of stunts can be performed, including anything ranging from a triple back flip to a triple front flip. The resulting simulator can be viewed as a game, a teaching tool for kinesiology, or as a preliminary sports prototyping tool.
- Michiel van de Panne and Cedric Lee,
"Ski Stunt Simulator: Experiments with Interactive Dynamics,"
Proceedings of the 14th Western Computer Graphics Symposium, Banff, Canada, April 2003.
2002
Was on leave July 2000 - July 2001.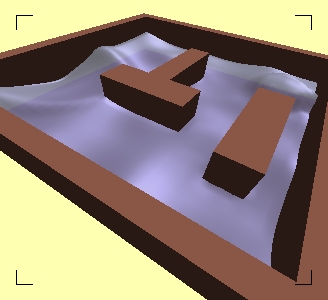
Stable Algorithms for Animating Shallow Water Waves project web page
Building on previous work in fluid mechanics, we are developing an efficient, stable shallow-water model appropriate for use in computer graphics.
- Anita T. Layton and Michiel van de Panne,
"A Numerically Efficient and Stable Algorithm for Animating Water Waves,"
The Visual Computer, Vol 18, Issue 1, 2002, p. 41-53 ( earlier technical report )
2001

Composable controllers for physics-based character animations
An ambitious goal in the area of physics-based computer animation is the creation of virtual actors that autonomously synthesize realistic human motions and possess a broad repertoire of lifelike motor skills. However, designing the controllers that encompass everyday skills such as walking, running, and getting up from a chair is a very daunting task. This project proposes a framework for composing specialist controllers, possibly designed by different researchers, into more general composite controllers having broader functionality.
- Petros Faloutsos, Michiel van de Panne and Demetri Terzopoulos,
"The virtual stuntman: dynamic characters with a repertoire of autonomous motor skills,"
Computers and Graphics, 25 (6) (2001), p. 933-953 (preprint)
Named Best Paper 2001 by the Editorial Advisory Board.
- P. Faloutsos, M. van de Panne, and D. Terzopoulos.
Composable Controllers
for Physics-Based Character Animation.
Proceedings of ACM SIGGRAPH 2001, p. 251-260.
- P. Faloutsos, M. van de Panne, D. Terzopoulos.
"Learning controller preconditions for physics-based character animation.",
Proceedings of the Learning Workshop, Snowbird, Utah, April, 2001. - Petros Faloutsos, Michiel van de Panne, and Demetri Terzopoulos.
Autonomous reactive control for simulated humanoids.
IEEE International Conference on Robotics and Animation, 2003.
2000
Grasp-based Human Motion Planning
The automated animation of human characters continues to be a challenge in computer graphics. We present a novel kinematic motion planning algorithm for character animation which addresses some of the outstanding problems. The problem domain for our algorithm is as follows: given an environment with designated handholds and footholds, determine the motion as an optimization problem. The algorithm exploits a combination of geometric constraints, posture heuristics, and gradient descent optimization in order to arrive at an appropriate motion sequence.
- M. Kalisiak and M. van de Panne.
Grasp-based Motion Planning
Algorithm for Character Animation.
Eurographics Workshop on Computer Animation and Simulation 2000, August 2000. - Maciej Kalisiak, Michiel van de Panne.
"A grasp-based motion planning algorithm for character animation,"
The Journal of Visualization and Computer Animation, 12(3), 2001, p. 117-129. Extended version of the workshop paper - Maciej Kalisiak, M.Sc. Thesis
Much as humans and animals control their motions with commands to their muscles, this project examines the feasibility of having an animator control the motion of a simulated character through commands to the character's virtual musculature. Such interfaces are intended to exploit human skill and intuition about the physics of motion in order to create equally skillful animated characters.
- J. F. Laszlo, M. van de Panne, and E. Fiume.
Interactive Control For
Physically-Based Animation.
Proceedings of ACM SIGGRAPH 2000, p. 201-208.
Papers
The following papers are for the most part a synthesis of a number of previously published results.
- Michiel van de Panne.
"Control for Simulated Human and Animal Motion",
IFAC Annual Reviews in Control 2000, 24(1), Elsevier Science Ltd., 189-199.
Also published in proceedings of IFAC Workshop on Motion Control, 1998. See the following entry. -
M. van de Panne.
Control for Simulated Human and Animal Motion,
plenary lecture and paper, Atelier IFAC International Workshop on Motion Control, Sept. 21-23, 1998, Grenoble, France, p425-435. - M. van de Panne, Joe Laszlo, Pedro Huang, and Petros Faloutsos.
Dynamic Human Simulation: Towards Agile Animated Characters,
IEEE International Conference on Robotics and Automation, San Fransisco, April 2000.
1999
Efficient Compression Techniques for Precomputed Visibility
In rendering large models, it is important to efficiently identify the small subset of primitives that is visible from a given viewpoint. One approach is to partition the viewpoint space into viewpoint cells, and then precompute a visibility table which explicitly records for each viewpoint cell whether or not each each primitive is potentially visible. We propose two algorithms for compressing such visibility tables in order to produce compact and natural descriptions of potentially-visible sets. Alternatively, the algorithms can be thought of as techniques for clustering cells and clustering primitives according to their visibility criteria.
- M. van de Panne and J. Stewart.
Efficient Compression Techniques
for Precomputed Visibility (PDF).
Eurographics Rendering Workshop, June 1999, 305-316.
Talk
- Michiel van de Panne.
"Biomechanics meets animation: Explorations in motion synthesis
for real and imaginary creatures".
Proceedings of the 8th International Symposium on Computer Simulation in Biomechanics, Calgary, Canada, August 1999, p59.
Extended abstract and keynote lecture.
1998
Shape Modeling of the Human Arm project web page
Generating realistic skin deformations arising from joint movement and muscle contraction is a requirement for producing realistic human character animation. We exploit range image technology to capture the human form and create parameterized animated surface models based upon this data. The work improves in several ways upon algorithms required to process and integrate the range data, as well as parameterizing the surface. Results are presented for the parameterized flexion of a human arm model.
- Jimmy Talbot, "Accurate Characterization of Skin Deformations Using Range Data", M.Sc. Thesis, 1998, University of Toronto
This paper applies trajectory-based optimization techniques to the synthesis of quadruped motions. The animator specifies hard constraints, consisting of footprint locations and their timings, and soft constraints that encode both physically-plausible behavior and the notion of comfortable positions. By dealing first and foremost with the spline trajectories representing the gross motion of the quadruped, the resulting optimization problem can be solved efficiently and robustly. Results include walking, jumping, and galloping quadrupeds.
-
N. Torkos and M. van de Panne,
Footprint-based Quadruped Motion Synthesis,
Proceedings of Graphics Interface '98, June 18-20, 1998, p. 151--160.
We use semi-transparent generalized cylinders to efficiently approximate the appearance of fine-scale geometry such as fur and pine needles on a branch. We present an efficient technique for dynamically tessellating generalized cylinders. We make direct use of the generalized cylinder's screen-space projection in order to minimize the number of polygons required to construct its image. Used in conjunction with our A-buffer polygon renderer, our technique strikes a good balance between speed and image quality when used at small to medium scales, generally surpassing other methods for rendering generalized cylinders.
-
I. Neulander and M. van de Panne,
Rendering Generalized
Cylinders with Paintstrokes,
Proceedings of Graphics Interface '98, June 18-20, 1998, p. 233--242.
1997
EG Workshop on Computer Animation and Simulation '97
-
D. Thalmann and M. van de Panne (eds),
Computer Animation and Simulation '97,
Proceedings of the Eurographics Workshop, 1997. Springer-Verlag, New York, 1997. ISBN 3-211-83048-0
We present a method of synthesizing walking, leaping, and running motions for bipeds from a set of input footprints and timing information.
-
M. van de Panne.
From Footprints to Animation.
Computer Graphics Forum, Volume 16, Number 4 (October 1997), p. 211-223.
paper: PDF (13 pages, 1.4 Mb)

Free-form deformations (FFDs) have long been a popular tool in modeling and keyframe animation. This paper extends the use of FFDs to a dynamic setting. A goal of this work is to enable normally rigid objects, such as teapots and tables, to come alive and learn to move about. Objects are assigned mass distributions and deformation properties, which allows them to translate, rotate, and deform according to internal and external forces.
-
P. Faloutsos, M. van de Panne, and D. Terzopoulos.
"Dynamic Animation Synthesis with Free-Form Deformations,"
IEEE Transactions on Visualization and Computer Graphics,
Volume 3, Number 3 (July-September 1997), p. 201-214. (see also CSRI Technical Report 326.)
Monaco, February 19-21, 1997, Monaco, 231-241.
European Control Conference, July 1-4, 1997, Brussels, 191-210.
1996
Limit Cycle Control of Walking
Seemingly simple behaviours such as human walking are difficult to model because of their inherent instability. This research proposes an approach to generating balanced 3D walking motions for physically-based computer animations by viewing the motions as a sequence of discrete cycles in state space. First, a mechanism to stabilize open loop walking motions is presented. Once this basic "balance" mechanism is in place, the underlying open loop motion can then be modified to generate variations on the basic walking gait.
- J. F. Laszlo, M. van de Panne, and E. Fiume. Limit Cycle Control and its Application to the Animation of Balancing and Walking, SIGGRAPH 96 Conference
Proceedings (ACM Computer Graphics), August 4-9, 1996, 155-162.
PDF (8 pages, 0.2 MB),
Motion Synthesis by Example
A technique is proposed for creating new animation from a set of representative example motions stored in a motion database. Animations are created by cutting-and-pasting together the example motion segments as required. Motion segments are selected based upon how well they fit into a desired motion and are then automatically tailored for a precise fit. Various fundamental problems associated with the use of motion databases are outlined. A prototype implementation is used to validate the proposed concepts and to explore possible solutions to the aforementioned problems.
-
A. Lamouret and M. van de Panne,
Motion Synthesis by Example
Eurographics Workshop on Computer Animation and Simulation, 1996, p199-212.
paper: PDF (11 pages, 0.3 MB),

A Planning Algorithm for Dynamic Motions
A technique is proposed for creating new animation from a set of representative example motions stored in a motion database. Animations are created by cutting-and-pasting together the example motion segments as required. Motion segments are selected based upon how well they fit into a desired motion and are then automatically tailored for a precise fit. Various fundamental problems associated with the use of motion databases are outlined. A prototype implementation is used to validate the proposed concepts and to explore possible solutions to the aforementioned problems.
- Pedro S. Huang and Michiel van de Panne
A Planning Algorithm for Dynamic Motions
Eurographics Workshop on Computer Animation and Simulation, 1996
paper: PDF (14 pages, 0.24 MB) Pedro Huang M.Sc. thesis: Planning for Dynamic Motions Using a Search Tree

Parameterized Gait Synthesis
We present a technique to produce a variety of physics-based gaits by using parameterized finite-state machine controllers that drive a motion in a way analogous to that of a windup-toy. Forward-dynamics simulation produces the final animation. We demonstrate results on creatures having two, four, and six legs.
-
M. van de Panne.
Parameterized Gait Synthesis,
IEEE Computer Graphics and Applications, 16(2), March 1996, 40--49.
preprint (PDF, 5.4 MB)
1995

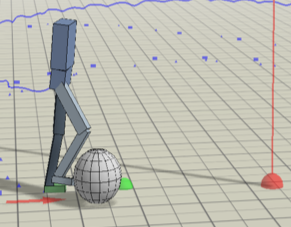
Guided Optimization for Balanced Locomotion
We present a continuation-method that uses a "hand of god" in order to support a walking biped during learning. As the learned control improves, the external forces applied by the "hand of god" are gradually diminished.
-
M. van de Panne and A. Lamouret,
Guided Optimization for Balanced Locomotion,
Eurographics Workshop on Computer Animation and Simulation '95 , p.165-177.
1994
Synthesizing Parameterized Motions
In striving to construct higher level control representations for simulated characters or creatures, one must seek flexible control representations to build upon. We present a method for the synthesis of parameterized, physics-based motions. The basis of the method is a low-level control representation in which linear combinations of controllers generally produce predictable in-between motions.
-
M. van de Panne, R. Kim, and E. Fiume.
Synthesizing Parameterized Motions,
5th Eurographics Workshop on Simulation and Animation, Oslo, Sept. 17-18, 1994.
We propose a new method of automatically finding periodic modes of locomotion for arbitrary articulated figures. Cyclic pose control graphs are used as our control representation. These specifically constrain the controller synthesis process to only those controllers producing periodic driving functions.
-
M. van de Panne, R. Kim, and E. Fiume.
Virtual Wind-Up toys,
Proceedings of Graphics Interface '94, May 1994, 208-215.
-
M. van de Panne.
Control Techniques for Physically-Based Animation,
Ph.D. Thesis,
Department of Electrical and Computer Engineering, University of Toronto, 1994.
1993
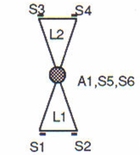
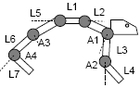
Sensor Actuator Networks
Sensor-actuator networks (SANs) are a new approach for the physically-based animation of objects. The user supplies the configuratíon of a mechanical system that has been augmented with simple sensors and actuators. It is then possible to automatically discover many possible modes of locomotion for the given object. The SANs providing the control for these modes of locomotion are simple in structure and produce robust control. A SAN consists of a small non-linear network of weighted connections between sensors and actuators. A stochastic procedure for finding and then improving suitable SANs is given. Ten different creatures controlled by this method are presented.
-
M. van de Panne and E. Fiume.
Sensor-actuator Networks,
Proceedings of SIGGRAPH `93. In Computer Graphics Proceedings, ACM SIGGRAPH, 1993, 335-342.
We present a method for planning turning motions for an inverted pendulum model. We demonstrate its use to plan realistic turning behaviors, using bicyclists, skiers, and snowboarders as examples.
-
M. van de Panne, E. Fiume, and Z. G. Vranesic.
Physically-based modeling and control of turning,
Computer Vision, Graphics, and Image Processing: Graphical Models and Image Processing.
Vol. 55, No. 6, Nov 1993, 507-521 PDF
Dynamic programming is performed for continuous-state problems by developing an appropriate discretization technique. We demonstrate results on systems having up to a 5-dimensional state space.
-
M. van de Panne, E. Fiume, and Z. G. Vranesic.
Optimal Controller Synthesis Using Approximating-Graph Dynamic Programming,
Proceedings of the American Control Conference, 1993, 2322-2326. Awarded best paper in session.
1992
A Controller for the Dynamic Walk of a Biped Across Variable Terrain
We develop a control strategy for controlling the simulated walk of a 7-link planar biped using dynamic programming as the core control mechanims.
-
M. van de Panne, E. Fiume, and Z. G. Vranesic.
A Controller for the Dynamic Walk of a Biped Across Variable Terrain,
Proceedings of the 31st IEEE Conf. on Decision and Control, 1992, 2668-2673.
Control Techniques for Physically- Based Animation,
-
M. van de Panne, E. Fiume, and Z. G. Vranesic.
Control Techniques for Physically- Based Animation,
Proc. of the Third Eurographics Workshop on Animation and Simulation, 1992.
1991
-
C. Archibald and M. van de Panne. Tracking and Grasping Moving Objects Using
Reflex Behaviour,
Proceedings of the 5th International Conference on Advanced Robotics, Pisa, Italy. June 19-22, 1991. pp. 643-648. NRC 31814
1990
Reusable Motion Synthesis Using State-Space Controllers
We apply dynamic programming to continuous state space to approximate optimal controllers for several low-dimensional systems. Animated motion can then be created by applying the controllers to the dynamical systems and observing the evolution of the state over time.
-
M. van de Panne, E. Fiume, and Z. G. Vranesic.
Reusable Motion Synthesis Using State-Space Controllers,
Proceedings of SIGGRAPH `90, In Computer Graphics Proceedings, ACM SIGGRAPH, 1990, 225-234.
1989
-
M. van de Panne, M. Leblanc, and Z. G. Vranesic. "MACHAM: A Best-Match
Content Addressable Memory",
Proceedings of the IEEE Pacific Rim Conference, 1989, 612- 615.
-
M. van de Panne.
Motion Synthesis for Simulation-Based Animation,
M.A.Sc. thesis, Department of Electrical Engineering, University of Toronto, 1989.