ACM Transaction on Graphics (Proceedings of SIGGRAPH 2008)
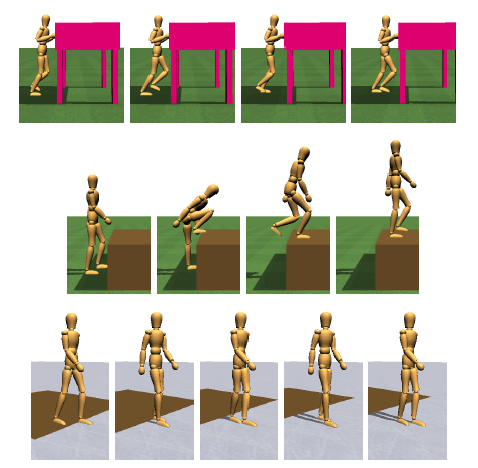
A regular walking gait is automatically
adapted to tasks involving a variety of interaction with the
environment, such as pushing furniture (top), taking a large step up
(middle), and walking on ice (bottom).
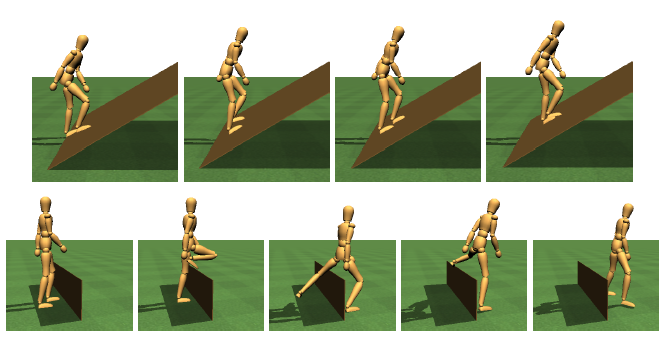
Modeling the large space of possible human motions requires scalable techniques. Generalizing from example motions or example controllers is one way to provide the required scalability. We present techniques for generalizing a controller for physics-based walking to significantly different tasks, such as climbing a large step up, or pushing a heavy object. Continuation methods solve such problems using a progressive sequence of problems that trace a path from an existing solved problem to the final desired-but-unsolved problem. Each step in the continuation sequence makes progress towards the target problem while further adapting the solution. We describe and evaluate a number of choices in applying continuation methods to adapting walking gaits for tasks involving interaction with the environment. The methods have been successfully applied to automatically adapt a regular cyclic walk to climbing a 65cm step, stepping over a 55cm sill, pushing heavy furniture, walking up steep inclines, and walking on ice. The continuation path further provides parameterized solutions to these problems.
PDF (3.2M)
More
Examples
author = {KangKang Yin and Stelian Coros and Philippe Beaudoin and Michiel van de Panne},
title = {Continuation Methods for Adapting Simulated Skills},
journal = {ACM Trans. Graph.},
year = {2008},
volume = {27},
number = {3},
}