Submission ID: d562f7cc
SP_SG_filter
Processed: 21-06-12. Download link: d562f7cca9b0acac-superpoint_superglue_filter.json.json
This page ranks the submission against all others using the same number of keypoints, regardless of descriptor size. Please hover over table headers for descriptions on metrics and full scene names.
- Phototourism dataset: Stereo track / Multiview track
- Prague Parks dataset: Stereo track / Multiview track
- Google Urban dataset: Stereo track / Multiview track
Metadata
- Authors: (contact)
- Keypoint: superpoint
- Descriptor: superpoint (1305 float32: 5220 bytes)
- Number of features: 2048
- Summary: Superpoint with 2048 features, using superglue matcher and outlier pre-filtering
- Paper: N/A
- Website: N/A
- Processing date: 21-06-12
Phototourism dataset / Stereo track
mAA at 10 degrees: 0.44019 (±0.00000 over 1 run(s) / ±0.13074 over 9 scenes)
Rank (per category): 59 (of 87)
| Scene | Features | Matches (raw) |
Matches (final) |
Rep. @ 3 px. | MS @ 3 px. | mAA(5o) | mAA(10o) |
| BM | 1537.0 | — | 137.4 | 0.408 Rank: 80/87 |
0.883 Rank: 56/87 |
0.25507 (±0.00000) Rank: 49/87 |
0.39020 (±0.00000) Rank: 51/87 |
| FCS | 1906.2 | — | 207.6 | 0.360 Rank: 70/87 |
0.846 Rank: 61/87 |
0.50603 (±0.00000) Rank: 59/87 |
0.65346 (±0.00000) Rank: 55/87 |
| LMS | 1120.6 | — | 170.8 | 0.347 Rank: 78/87 |
0.662 Rank: 65/87 |
0.45994 (±0.00000) Rank: 63/87 |
0.58848 (±0.00000) Rank: 61/87 |
| LB | 1513.5 | — | 135.6 | 0.337 Rank: 74/87 |
0.705 Rank: 38/87 |
0.35385 (±0.00000) Rank: 49/87 |
0.48830 (±0.00000) Rank: 57/87 |
| MC | 1759.7 | — | 153.6 | 0.373 Rank: 77/87 |
0.837 Rank: 71/87 |
0.20911 (±0.00000) Rank: 49/87 |
0.34095 (±0.00000) Rank: 73/87 |
| MR | 1277.3 | — | 122.0 | 0.393 Rank: 56/87 |
0.881 Rank: 58/87 |
0.16632 (±0.00000) Rank: 77/87 |
0.25363 (±0.00000) Rank: 77/87 |
| PSM | 1874.0 | — | 144.3 | 0.296 Rank: 69/87 |
0.606 Rank: 40/87 |
0.13793 (±0.00000) Rank: 52/87 |
0.26269 (±0.00000) Rank: 50/87 |
| SF | 1761.6 | — | 196.5 | 0.338 Rank: 70/87 |
0.780 Rank: 51/87 |
0.33840 (±0.00000) Rank: 68/87 |
0.49526 (±0.00000) Rank: 66/87 |
| SPC | 1737.8 | — | 143.6 | 0.330 Rank: 78/87 |
0.779 Rank: 63/87 |
0.32244 (±0.00000) Rank: 65/87 |
0.48877 (±0.00000) Rank: 62/87 |
| Avg | 1609.7 | — | 156.8 | 0.354 Rank: 78/87 |
0.776 Rank: 58/87 |
0.30545 (±0.00000) Rank: 63/87 |
0.44019 (±0.00000) Rank: 59/87 |
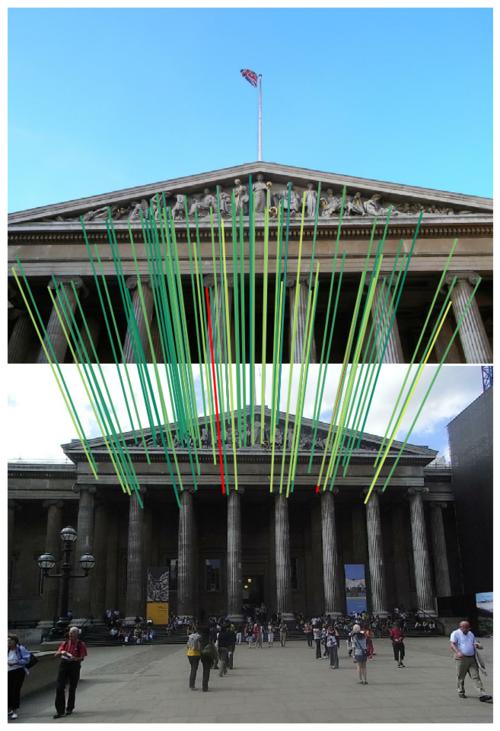
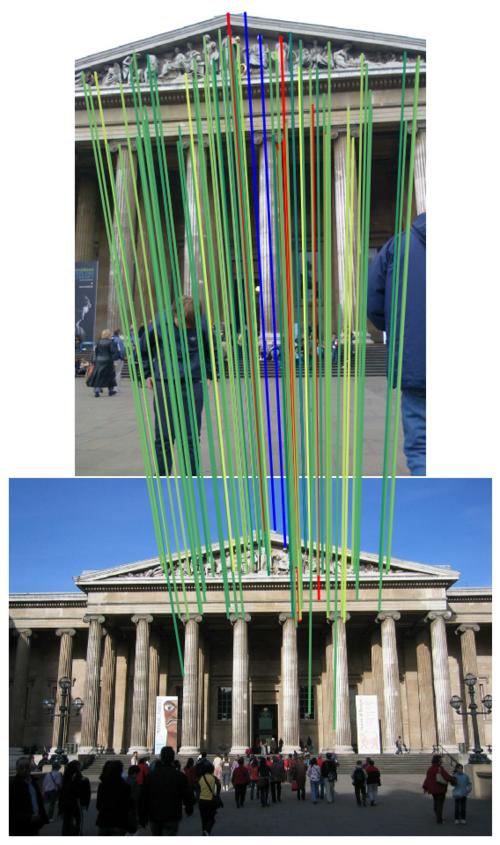
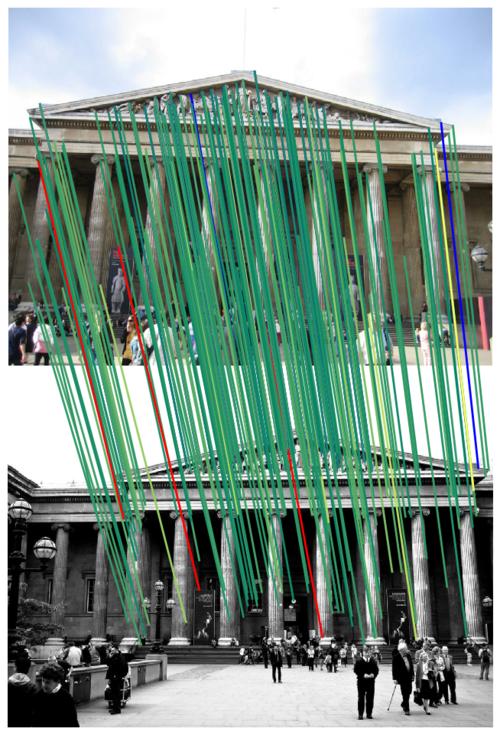
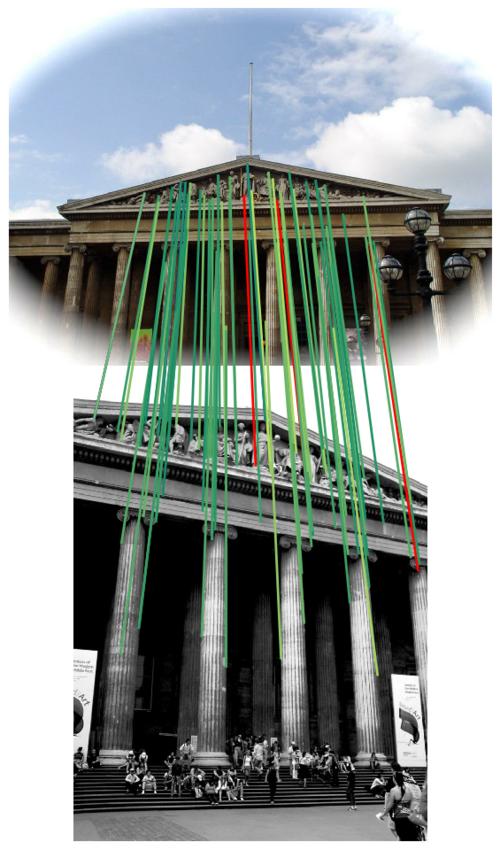
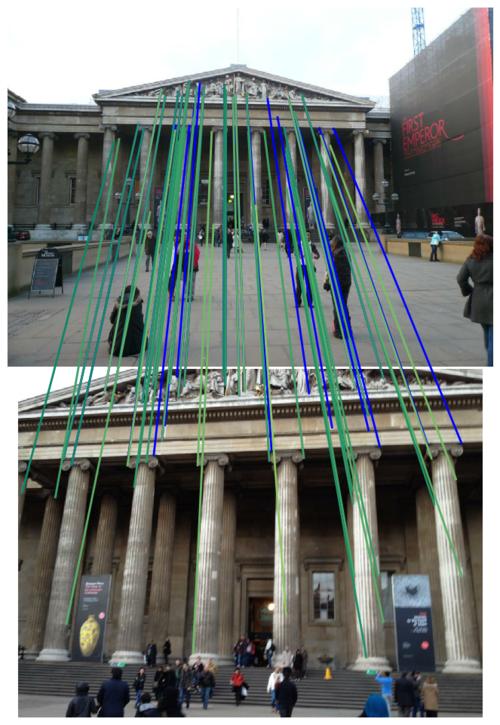
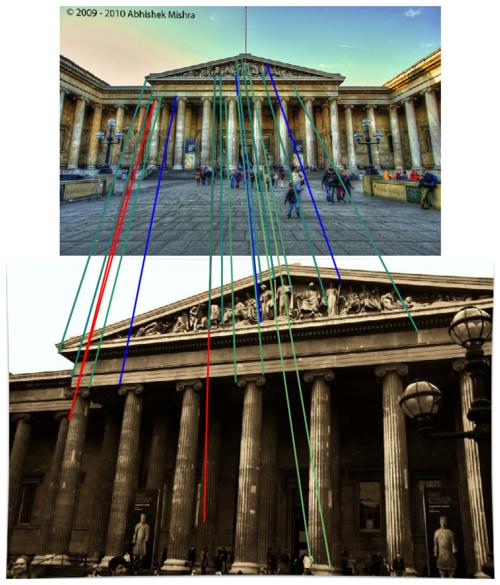
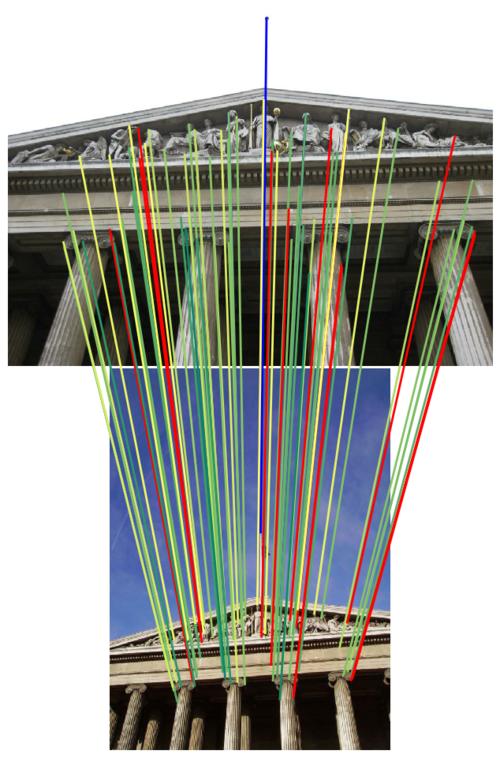
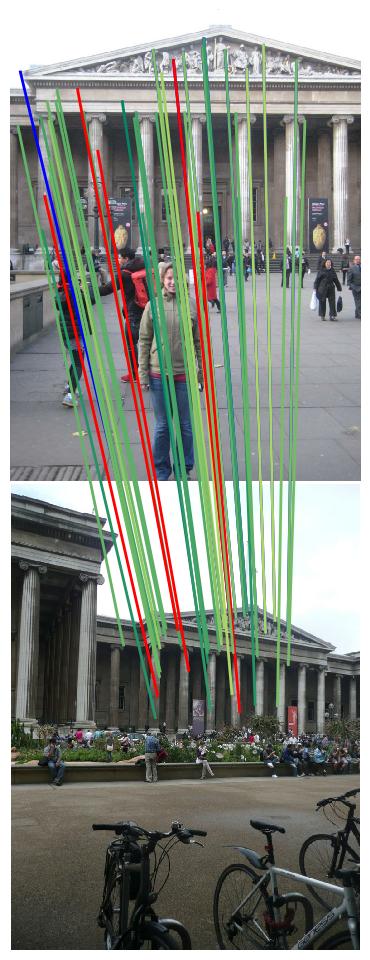
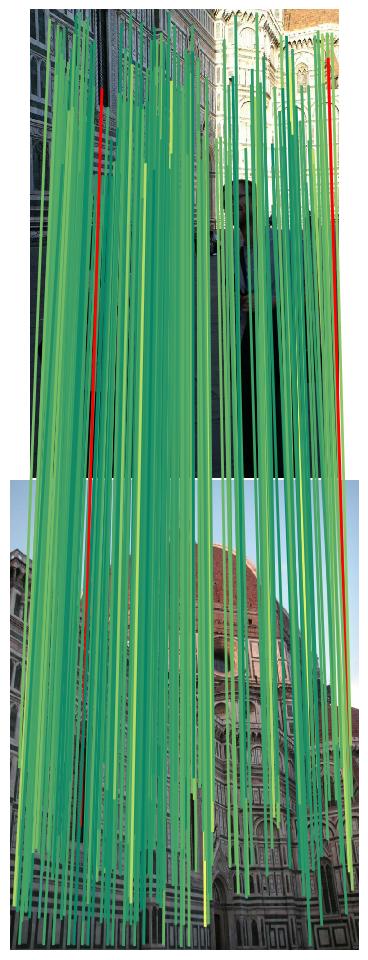
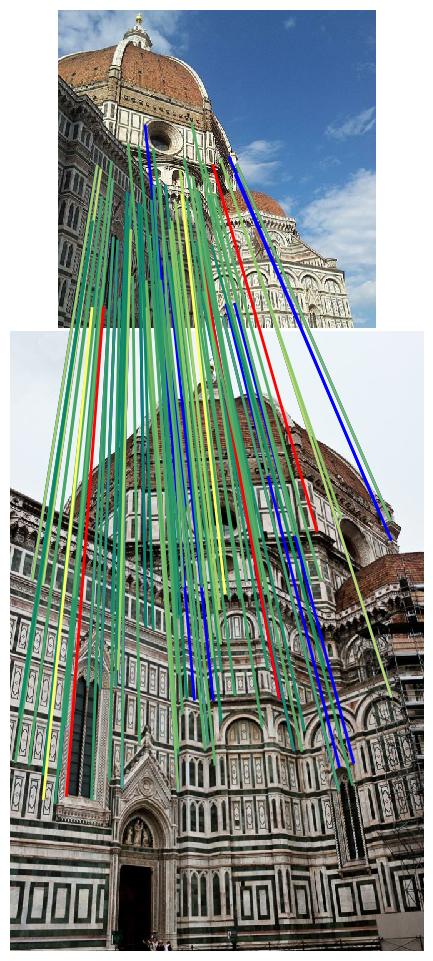
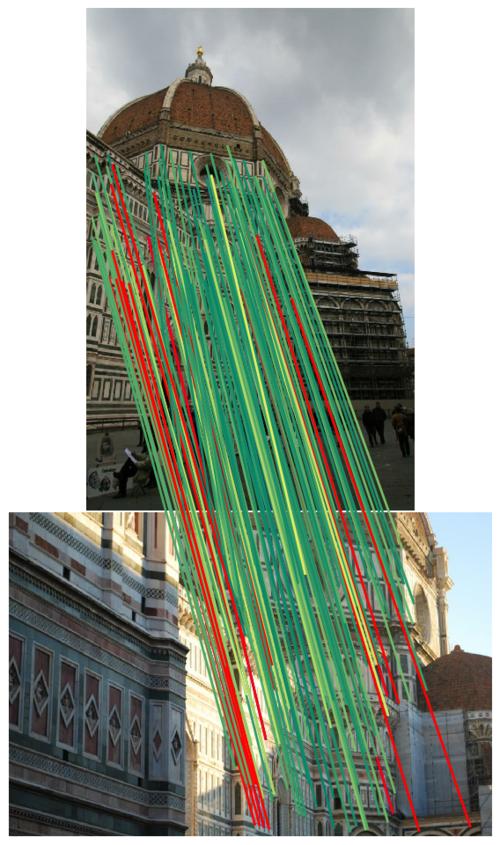
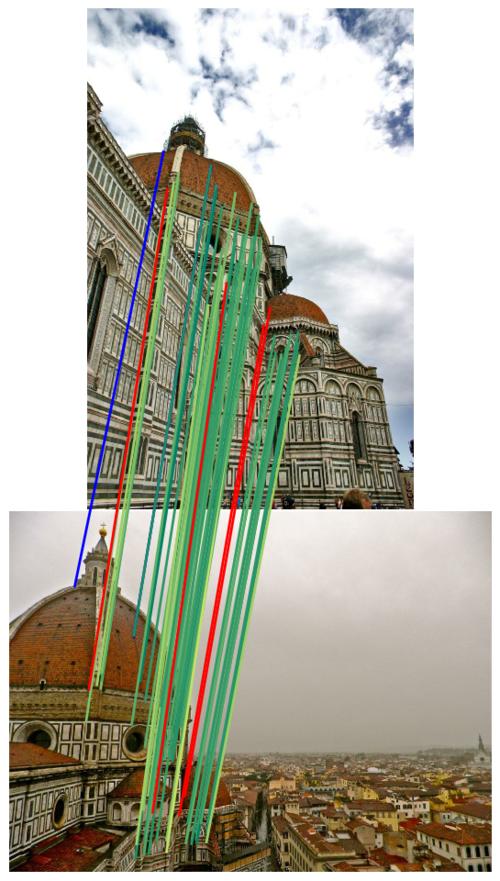
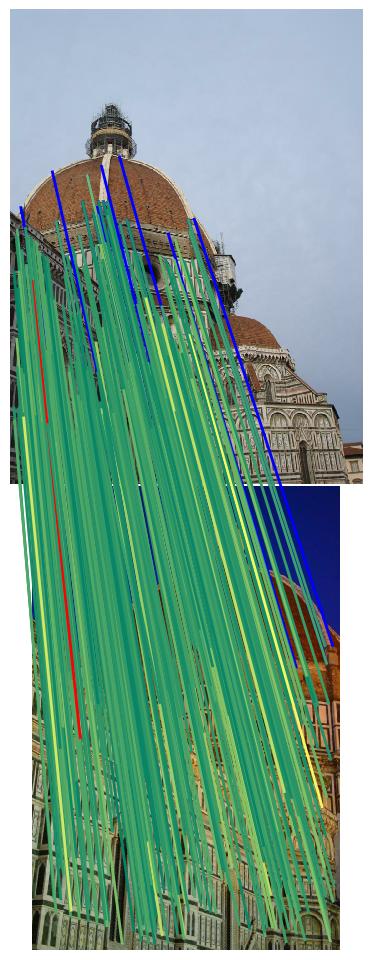
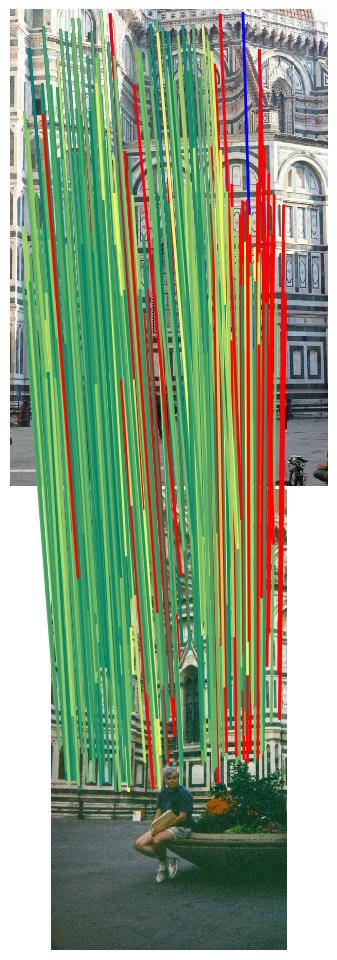
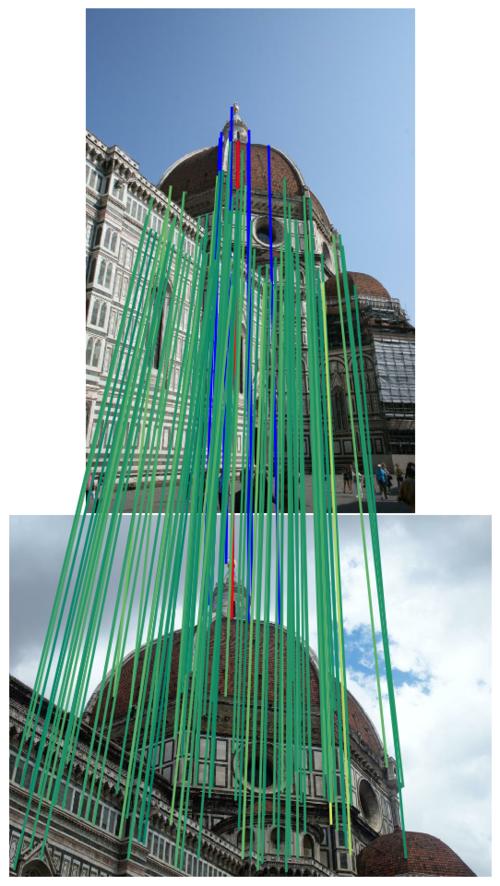
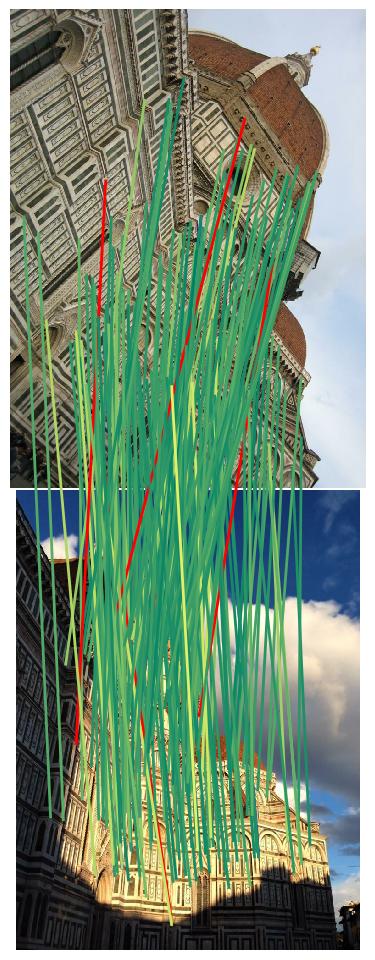
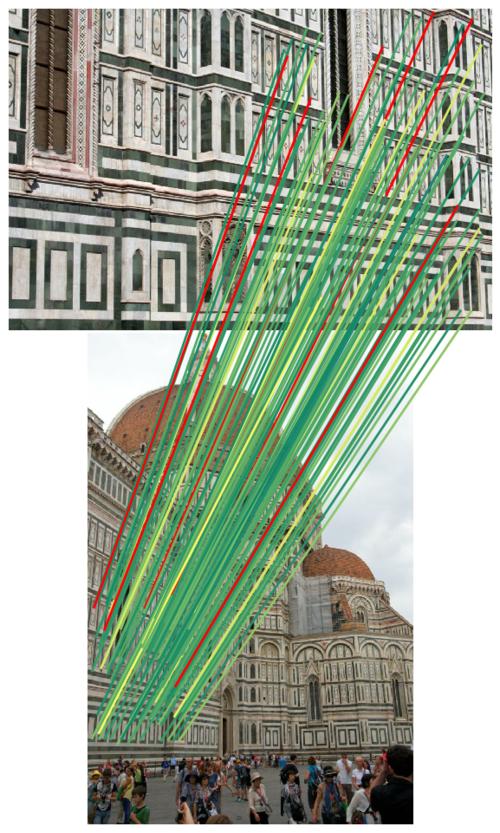
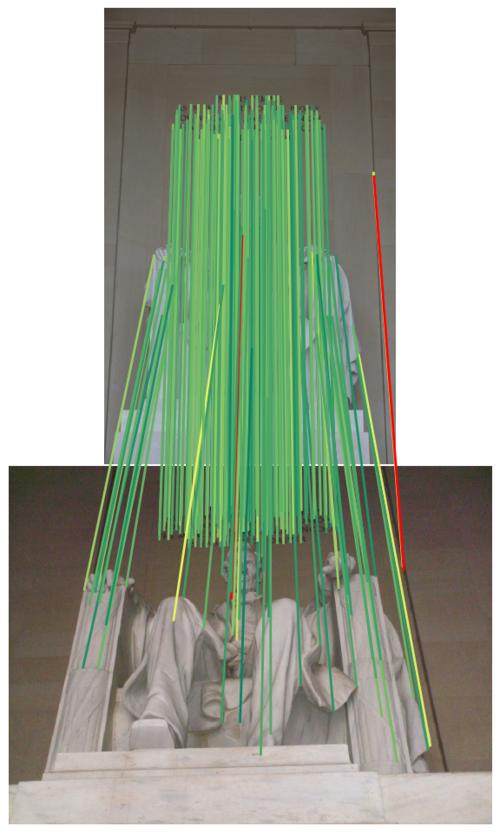
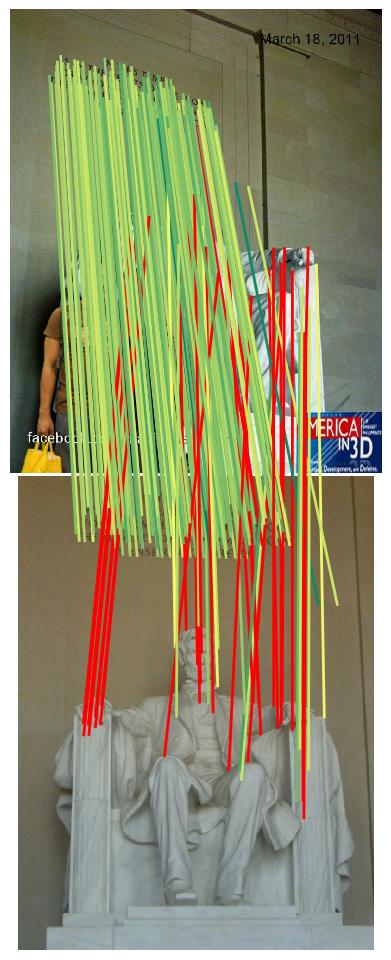
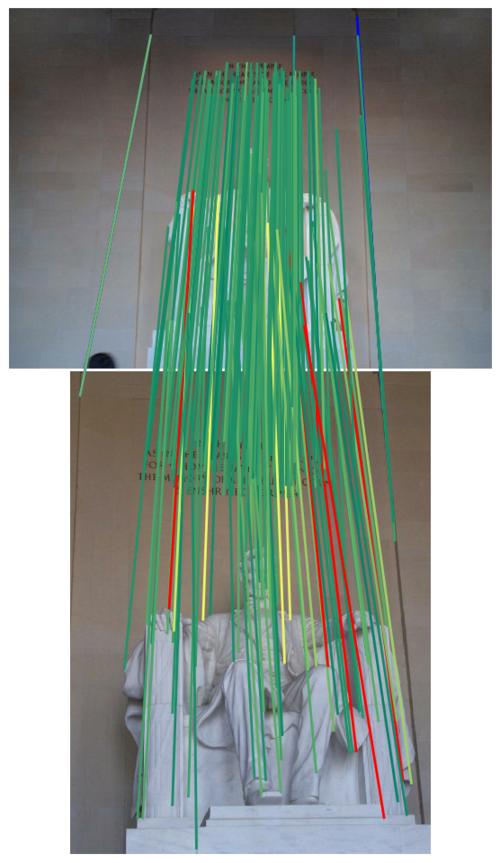
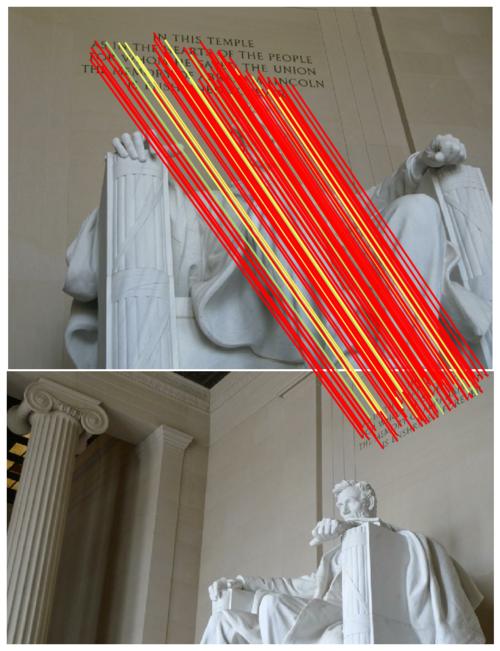
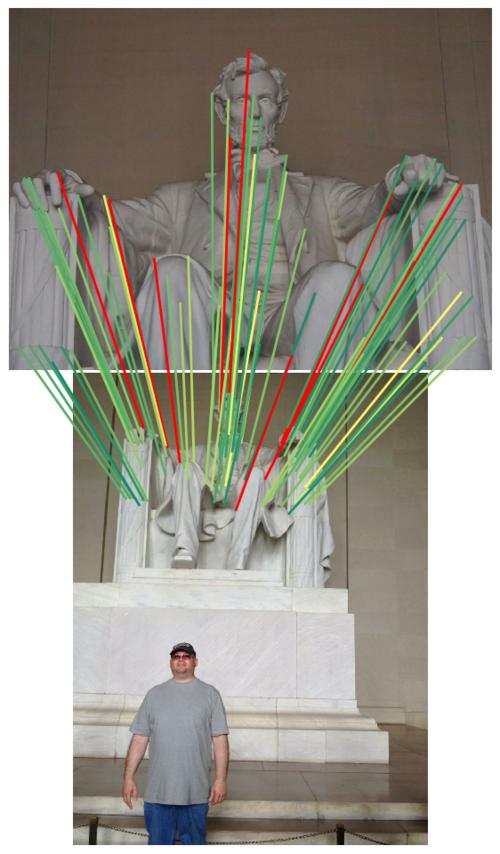
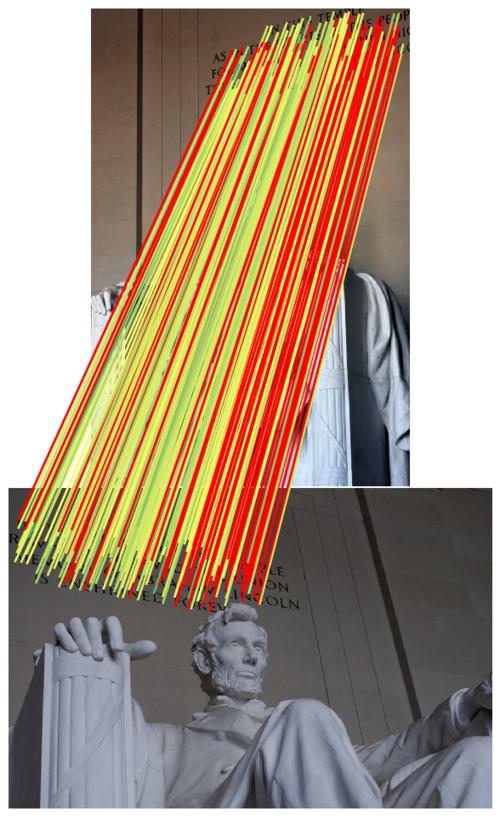
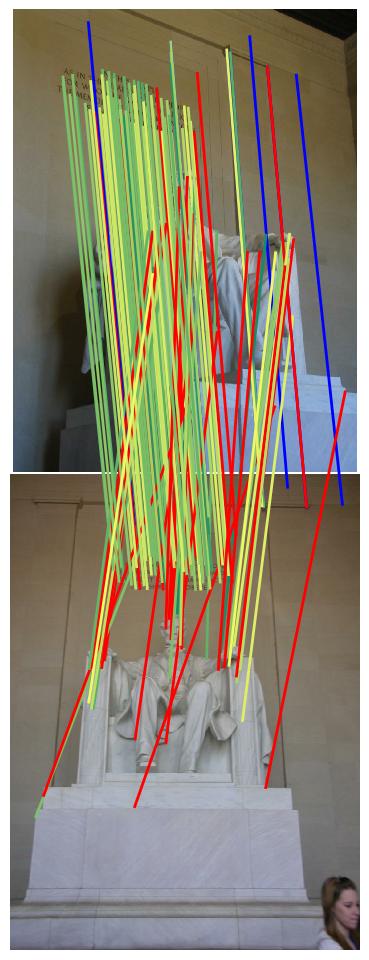
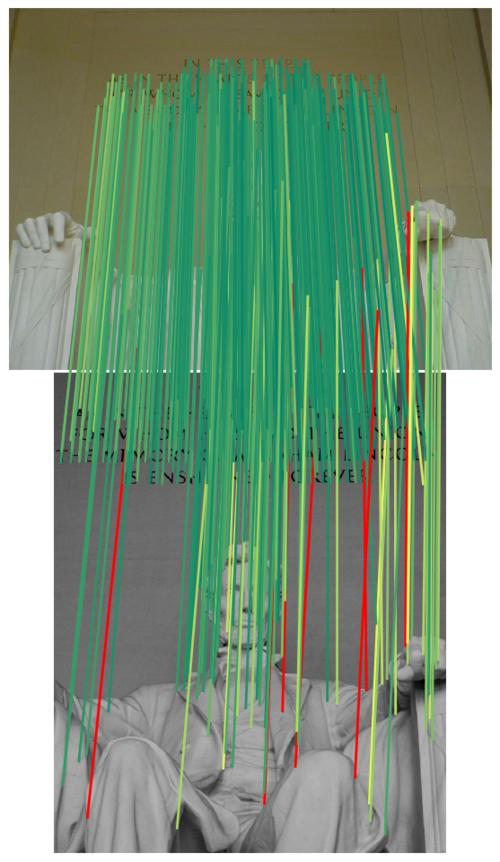
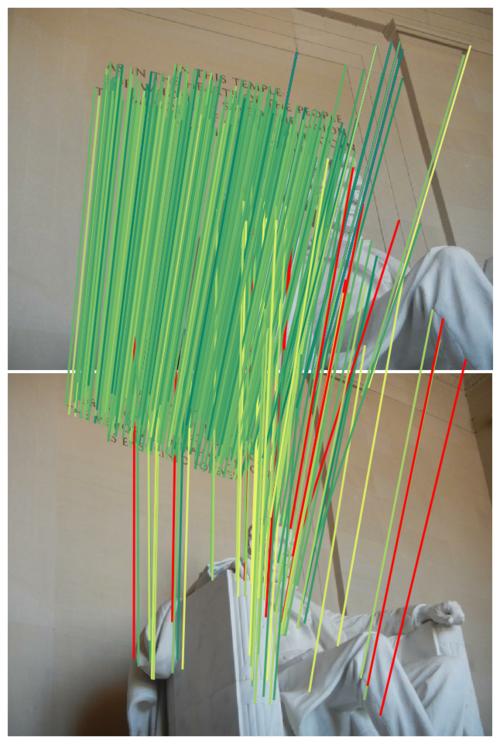
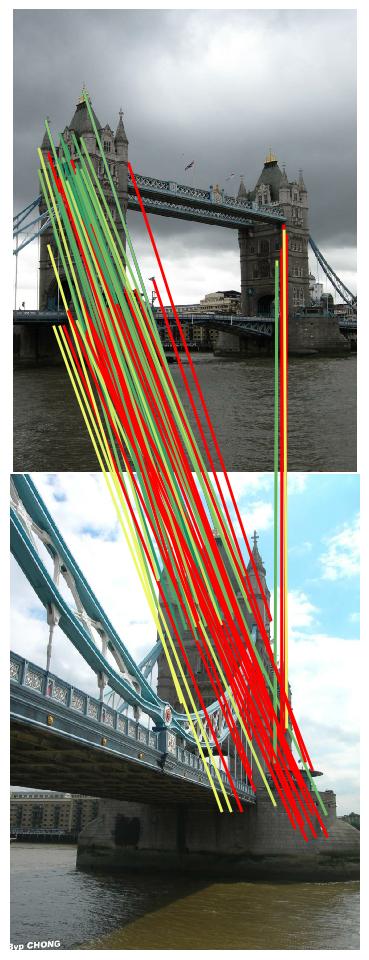
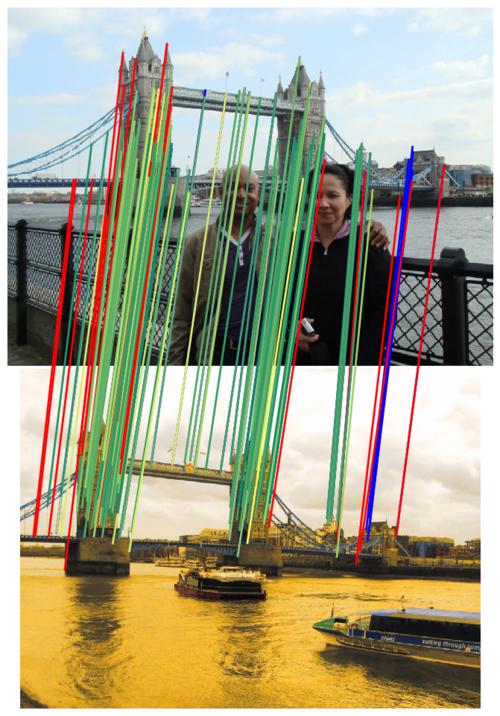
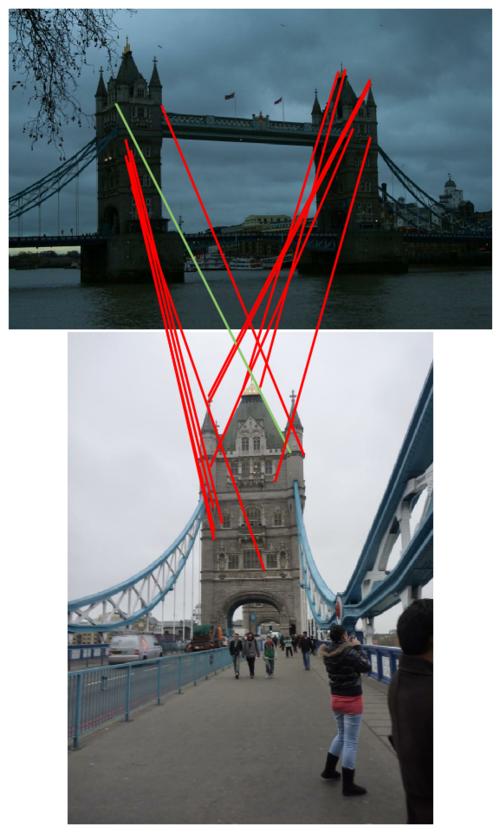
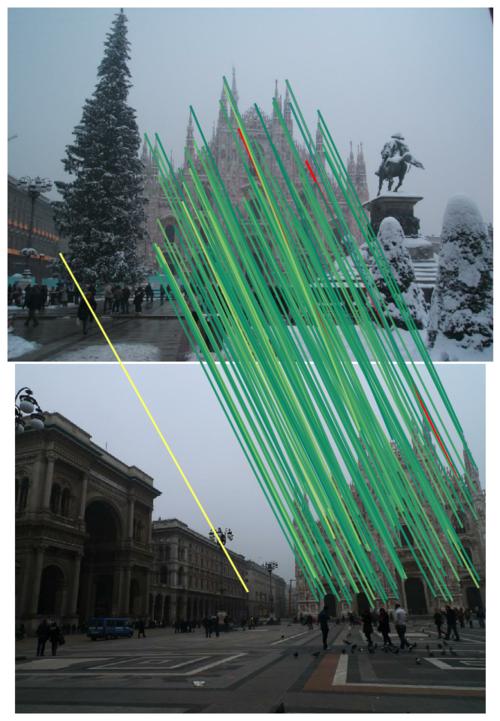
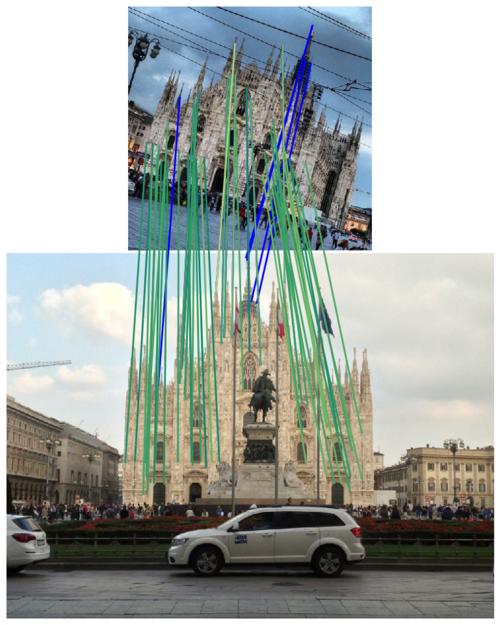
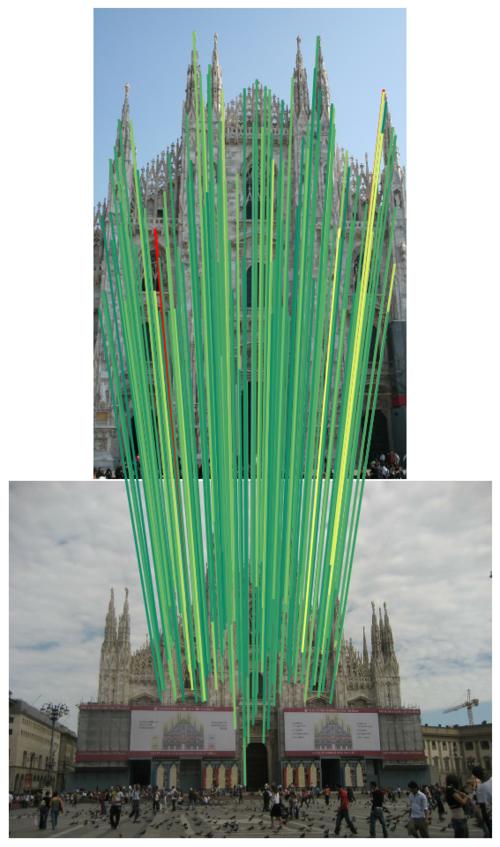
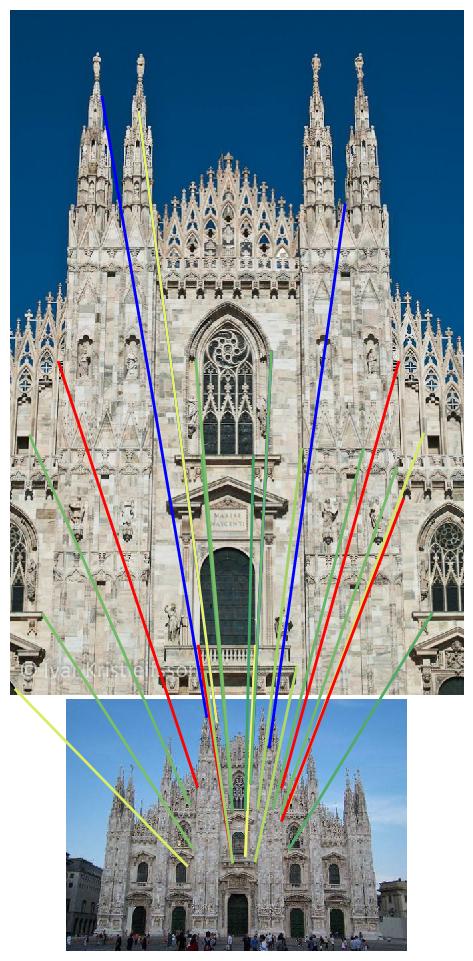
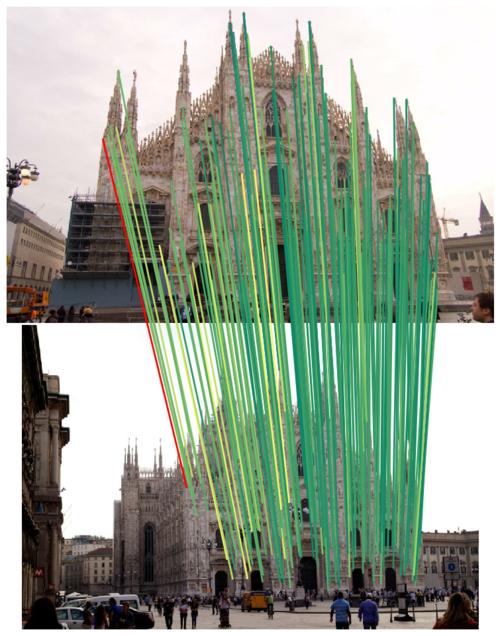
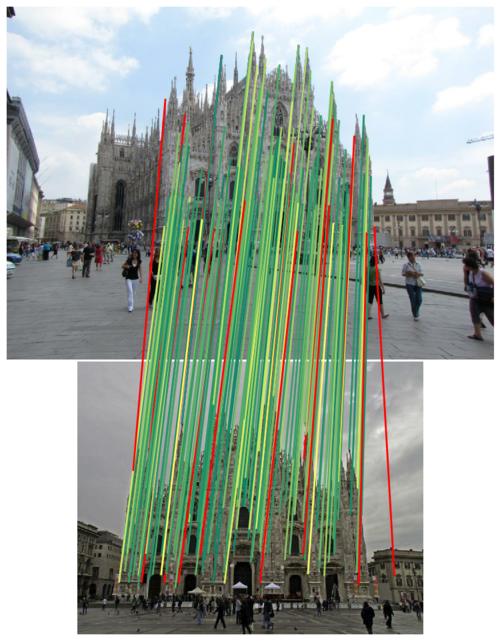
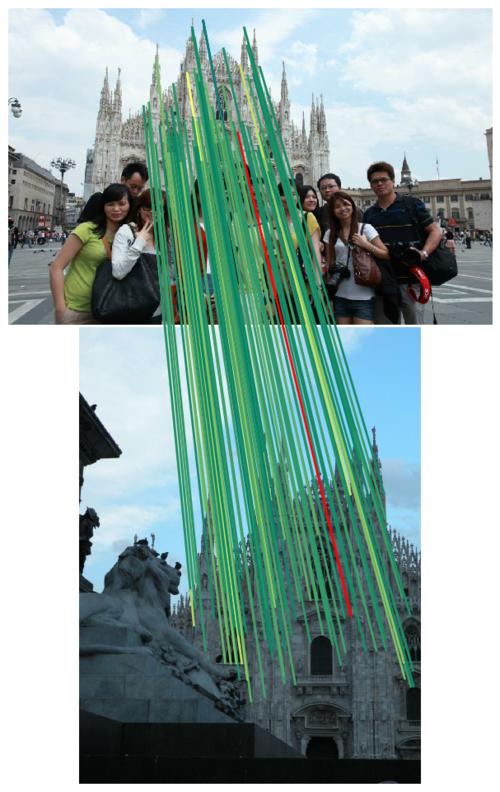
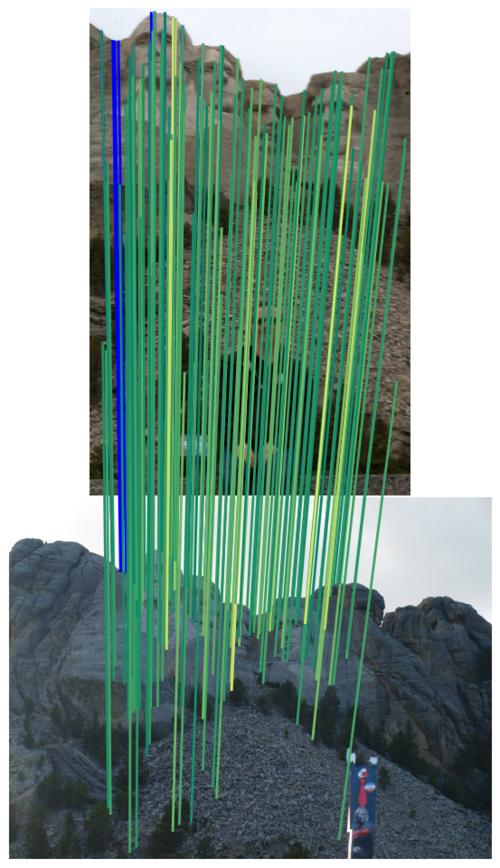
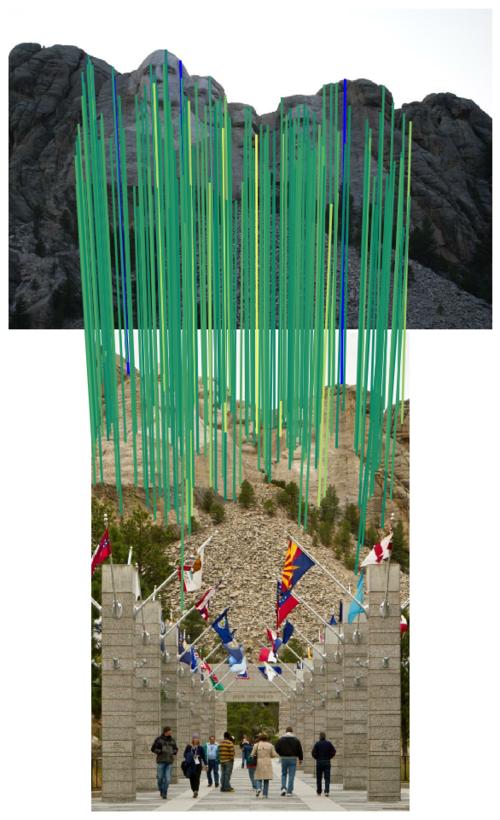
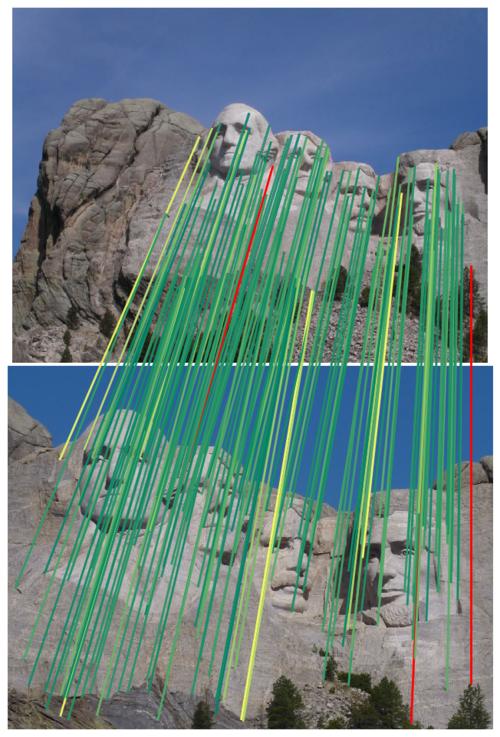
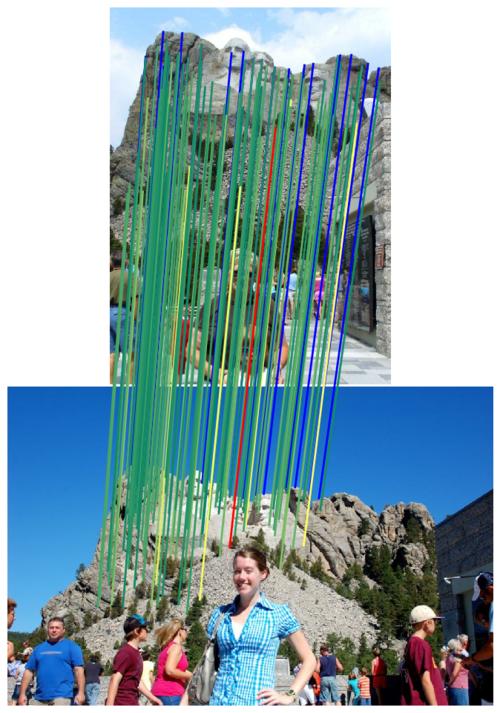
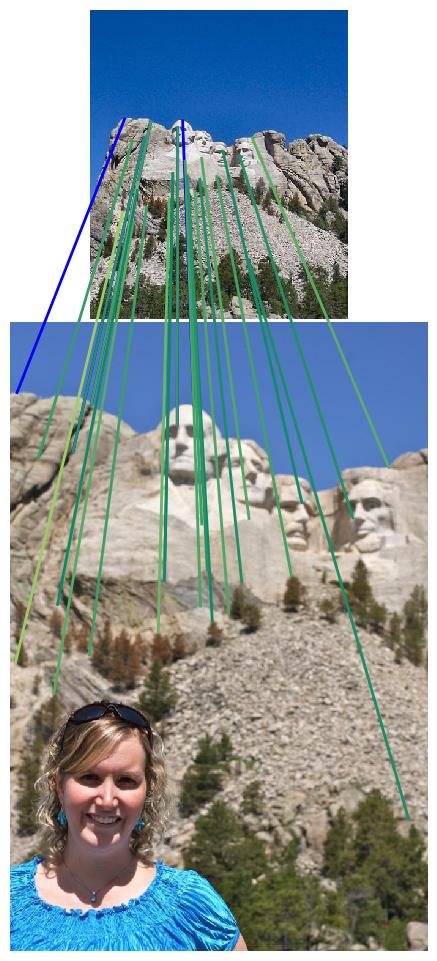
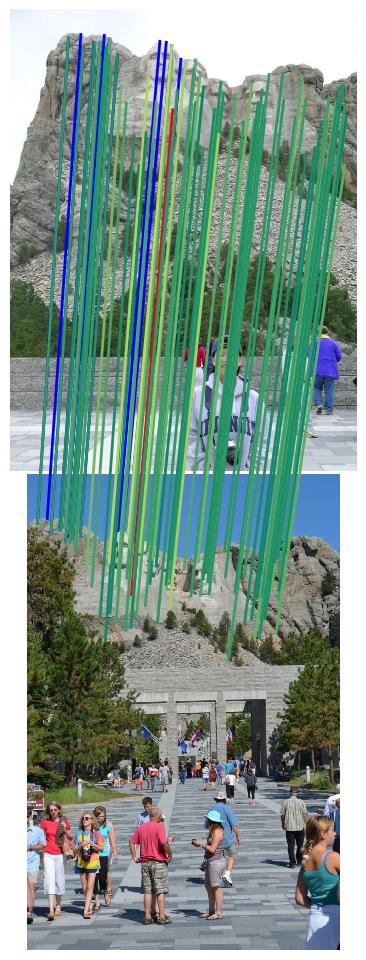
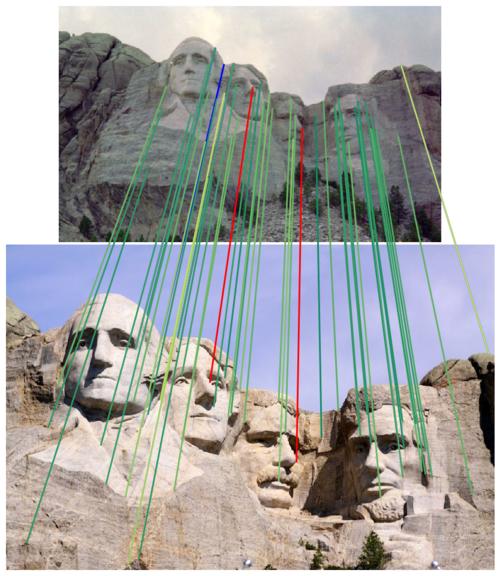
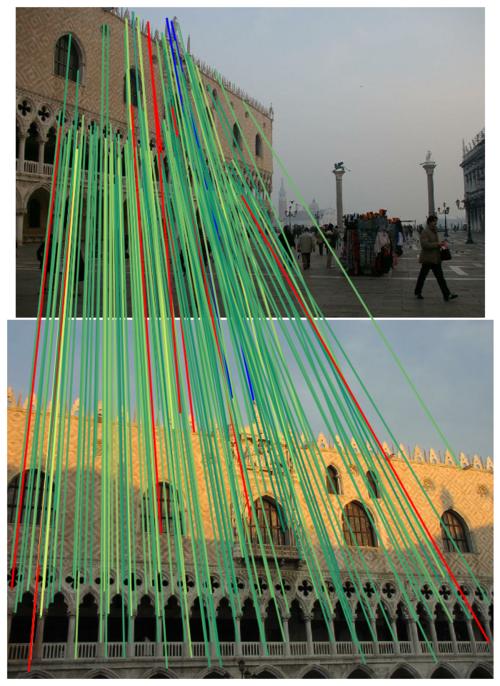
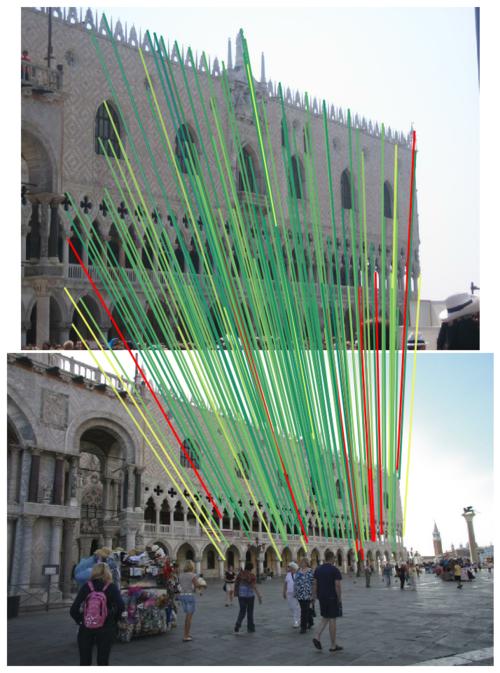
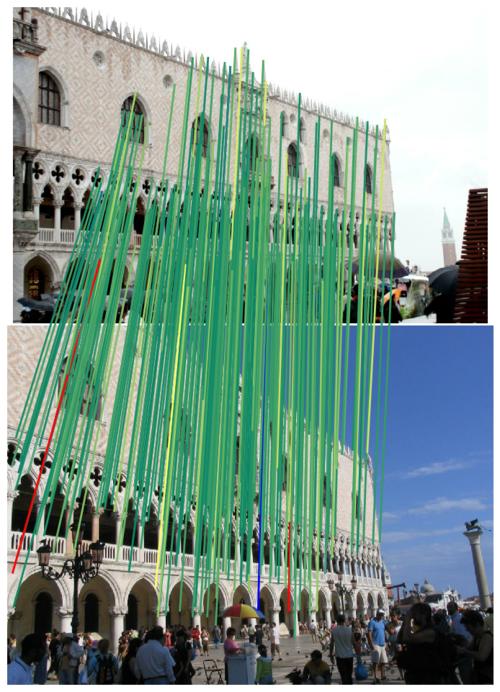
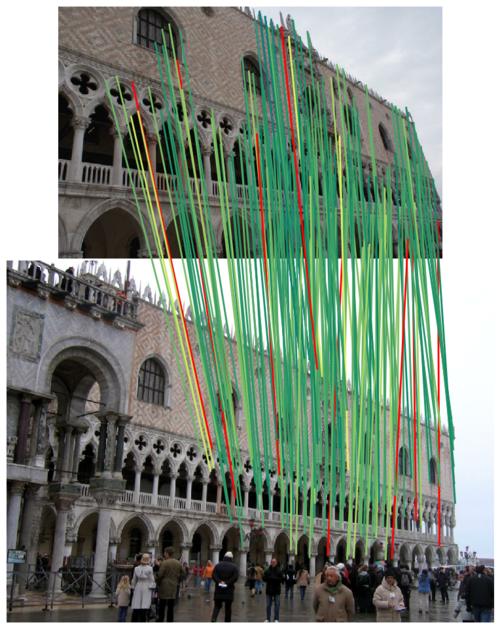
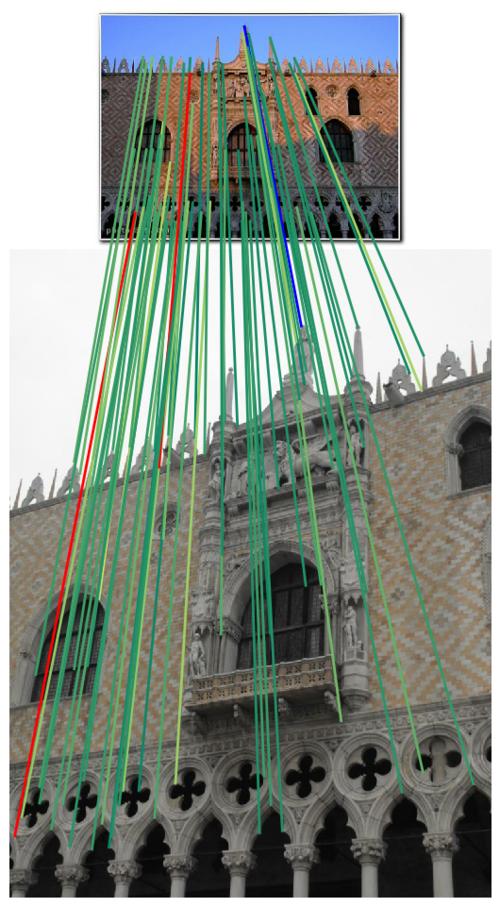
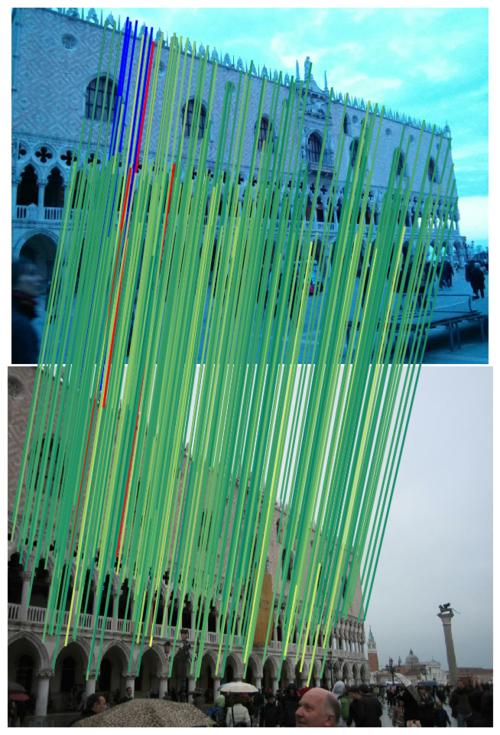
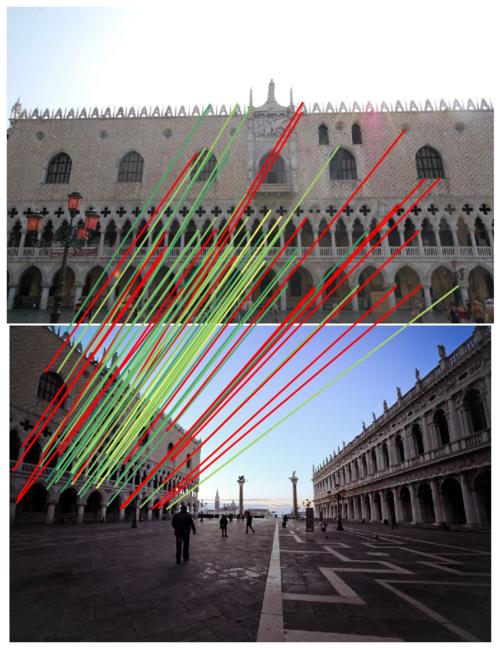
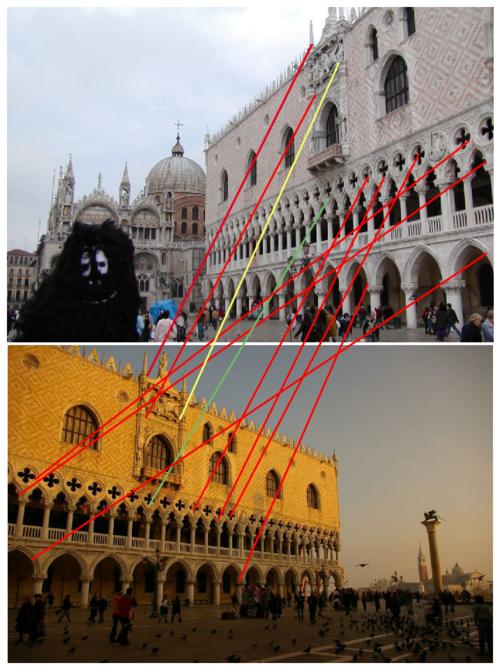
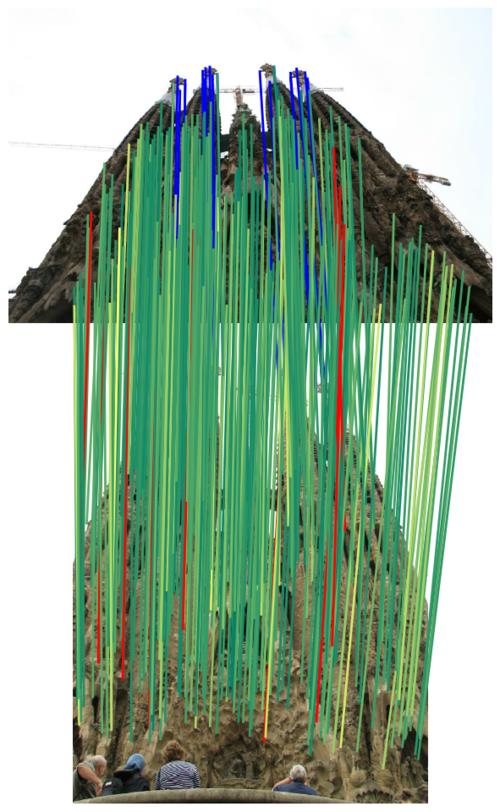
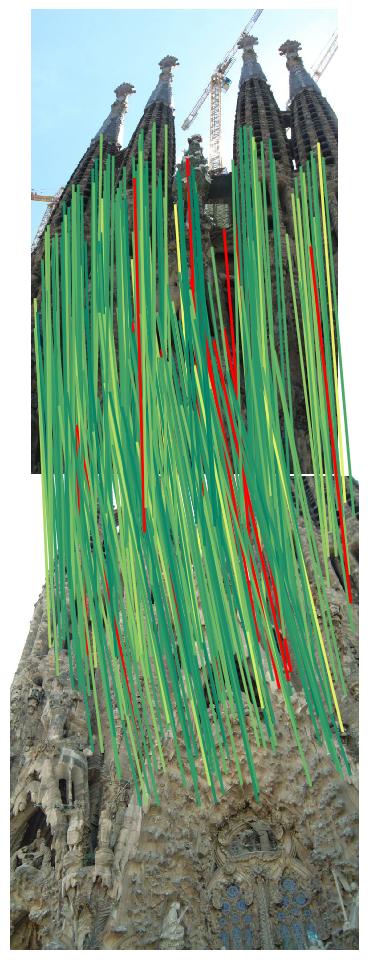
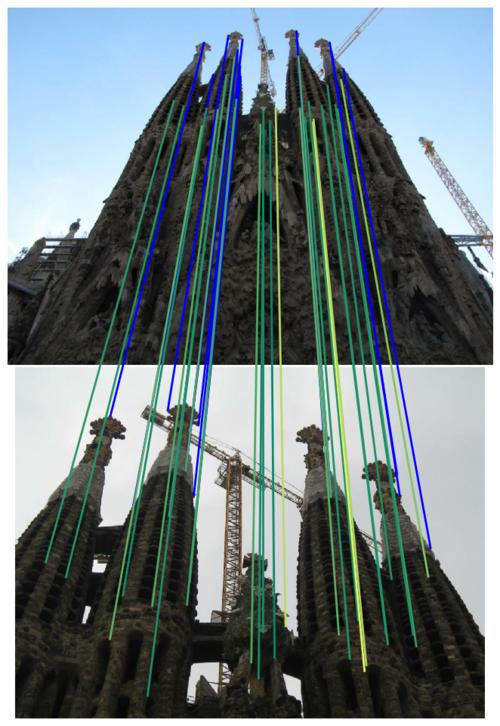
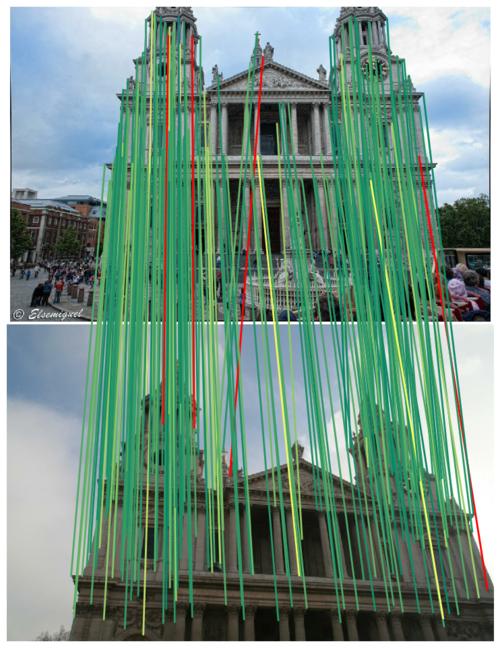
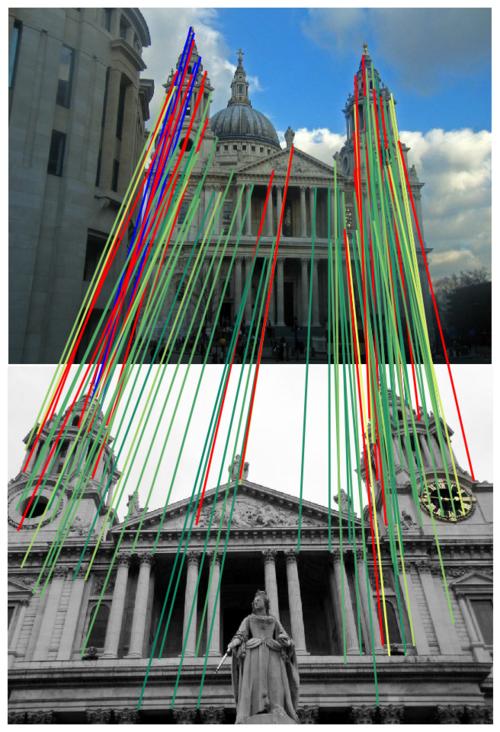
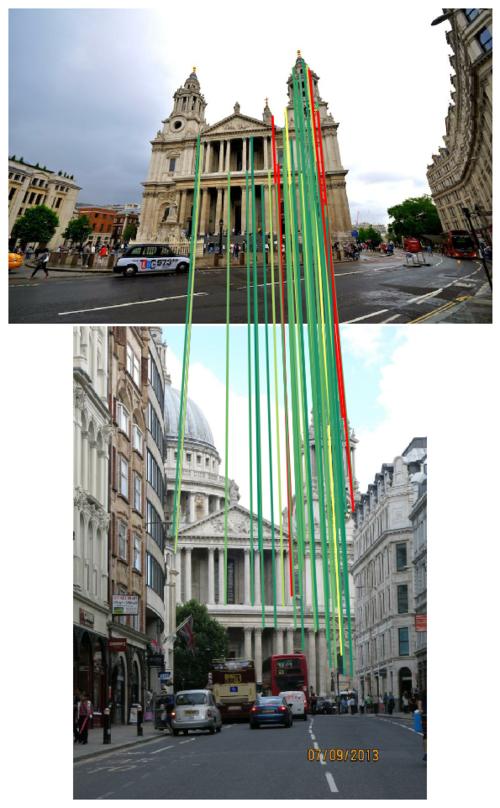
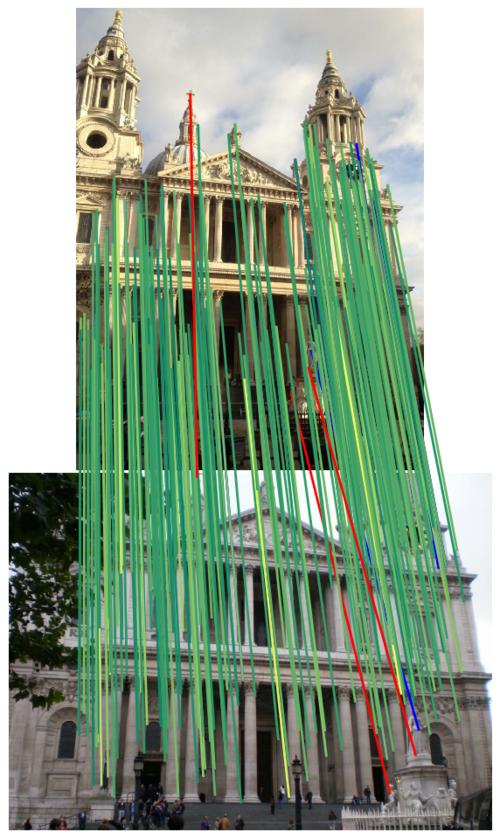
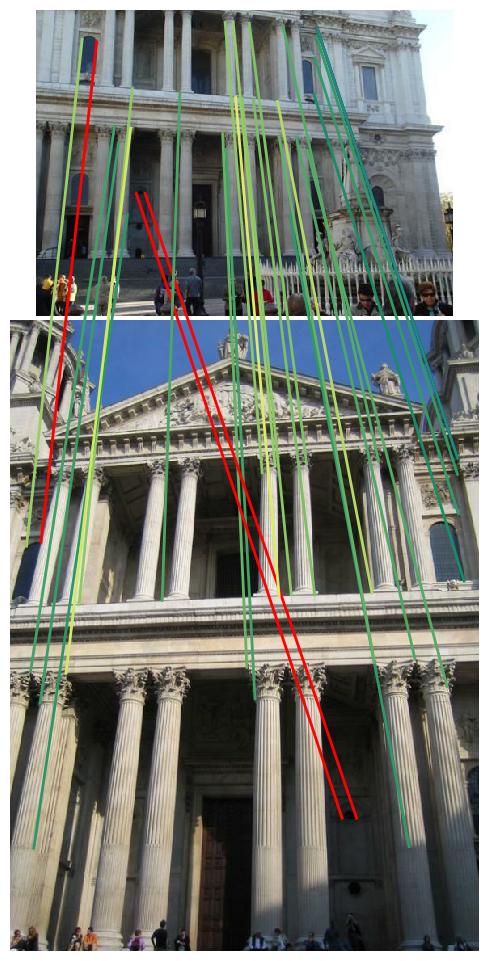
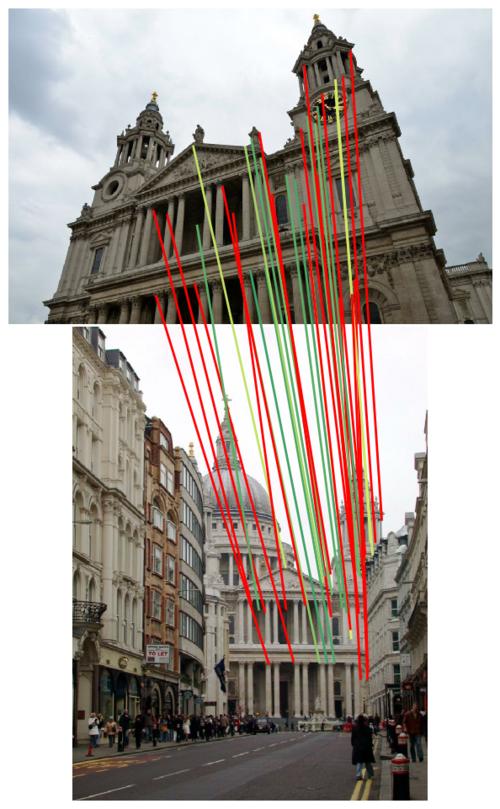
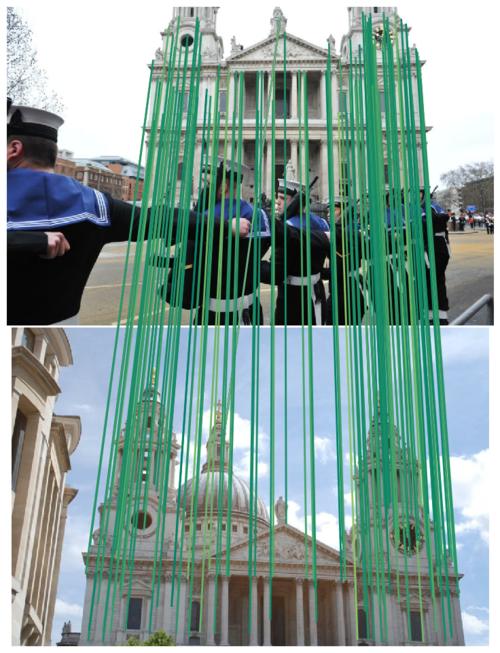
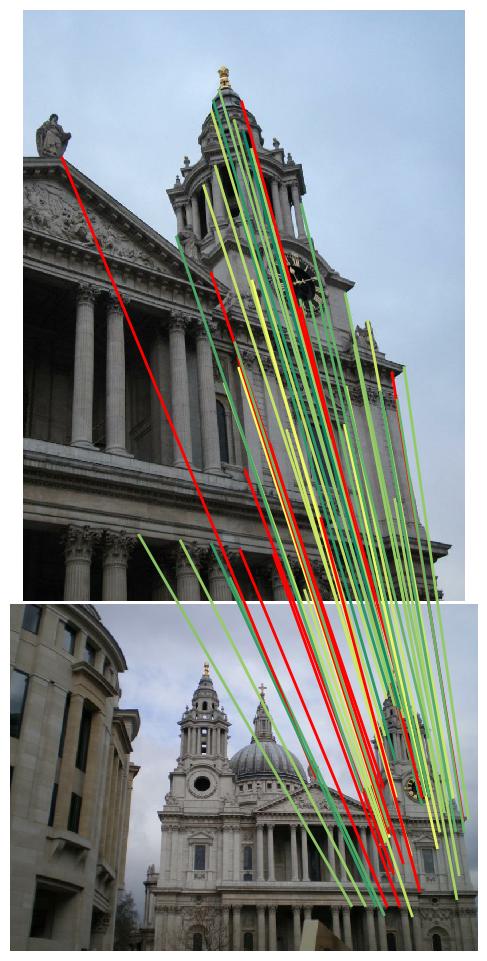
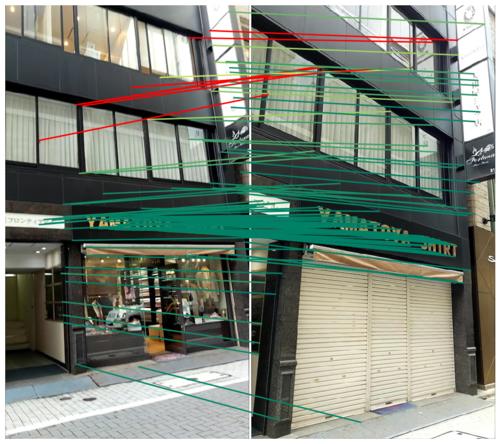
We show the inliers that survive the robust estimation loop (i.e. RANSAC), or those supplied with the submission if using custom matches, and use the depth estimates to determine whether they are correct. We draw matches above a 5-pixel error threshold in red, and those below are color-coded by their error, from 0 (green) to 5 pixels (yellow). Matches for which we do not have depth estimates are drawn in blue. Please note that the depth maps are estimates and may contain errors.
— British Museum —


— Florence Cathedral Side —

— Lincoln Memorial Statue —

— London Bridge —







— Milan Cathedral —



— Mount Rushmore —


— Piazza San Marco —


— Sagrada Familia —



— Saint Paul's Cathedral —


Phototourism dataset / Multiview track
mAA at 10 degrees: N/A (±0.00000 over 1 run(s) / ±0.11536 over 9 scenes)
Rank (per category): 47 (of 87)
| Scene | Features | Matches (input) |
RegistrationRatio (%) | Number of Landmarks |
Track Length | ATE | mAA(50) | mAA(100) |
| BM | 1537.0 | 138.88 | 99.76 Rank: 54/87 |
1014.58 Rank: 71/87 |
5.135 Rank: 20/87 |
0.38525 Rank: 40/87 |
0.53452 (±0.00000) Rank: 45/87 |
0.67840 (±0.00000) Rank: 45/87 |
| FCS | 1906.2 | 213.12 | 97.07 Rank: 58/87 |
1783.56 Rank: 61/87 |
4.834 Rank: 50/87 |
0.24121 Rank: 24/87 |
0.71829 (±0.00000) Rank: 51/87 |
0.78283 (±0.00000) Rank: 46/87 |
| LMS | 1120.6 | 185.20 | 98.93 Rank: 56/87 |
1021.53 Rank: 77/87 |
5.925 Rank: 9/87 |
0.28626 Rank: 28/87 |
0.82827 (±0.00000) Rank: 41/87 |
0.88302 (±0.00000) Rank: 45/87 |
| LB | 1513.5 | 164.66 | 97.72 Rank: 57/87 |
1081.38 Rank: 68/87 |
5.311 Rank: 30/87 |
0.50188 Rank: 59/87 |
0.66301 (±0.00000) Rank: 55/87 |
0.77000 (±0.00000) Rank: 54/87 |
| MC | 1759.7 | 151.20 | 99.60 Rank: 61/87 |
1227.73 Rank: 63/87 |
4.984 Rank: 51/87 |
0.35955 Rank: 36/87 |
0.50794 (±0.00000) Rank: 55/87 |
0.65775 (±0.00000) Rank: 55/87 |
| MR | 1277.3 | 120.52 | 92.67 Rank: 61/87 |
837.50 Rank: 79/87 |
5.094 Rank: 1/87 |
0.55402 Rank: 56/87 |
0.34605 (±0.00000) Rank: 63/87 |
0.47065 (±0.00000) Rank: 64/87 |
| PSM | 1874.0 | 143.82 | 96.25 Rank: 48/87 |
1610.56 Rank: 69/87 |
4.235 Rank: 47/87 |
0.43132 Rank: 46/87 |
0.59209 (±0.00000) Rank: 46/87 |
0.67623 (±0.00000) Rank: 46/87 |
| SF | 1761.6 | 192.91 | 98.60 Rank: 48/87 |
1721.44 Rank: 65/87 |
4.942 Rank: 32/87 |
0.31169 Rank: 56/87 |
0.72961 (±0.00000) Rank: 49/87 |
0.81715 (±0.00000) Rank: 48/87 |
| SPC | 1737.8 | 149.37 | 99.66 Rank: 53/87 |
1330.08 Rank: 65/87 |
4.961 Rank: 51/87 |
0.51019 Rank: 59/87 |
0.70249 (±0.00000) Rank: 49/87 |
0.80997 (±0.00000) Rank: 49/87 |
| Avg | 1609.7 | 162.19 | 97.81 Rank: 52/87 |
1292.04 Rank: 71/87 |
5.047 Rank: 33/87 |
0.39793 Rank: 46/87 |
0.62470 (±0.00000) Rank: 46/87 |
0.72733 (±0.00000) Rank: 47/87 |
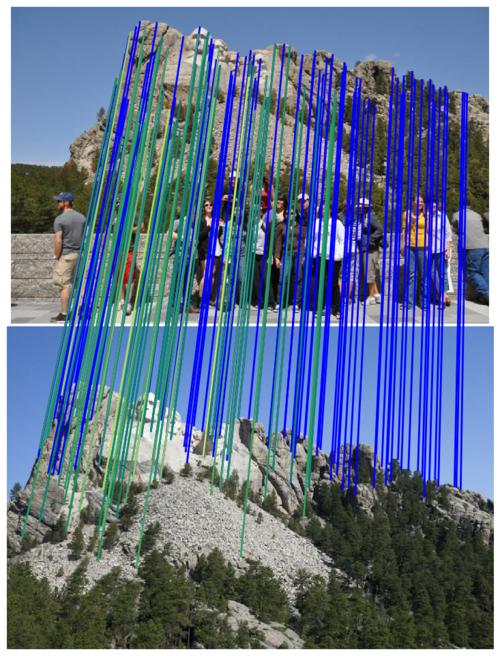
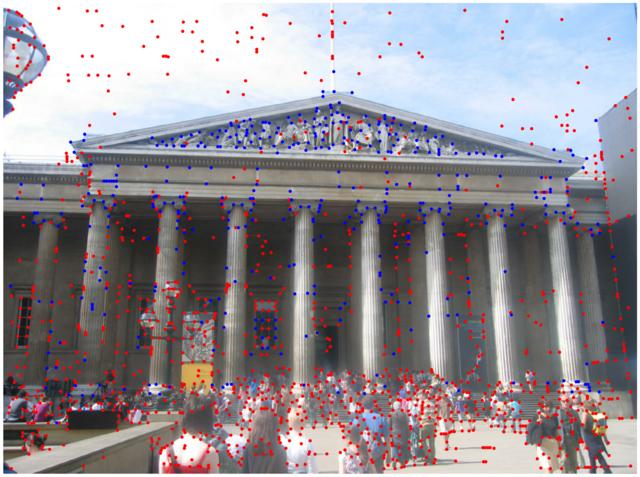
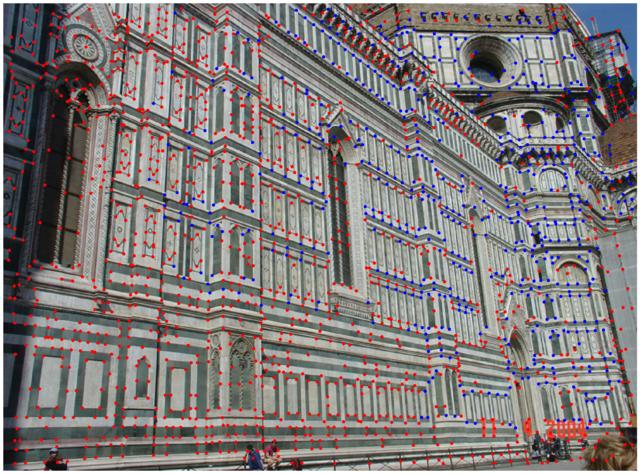
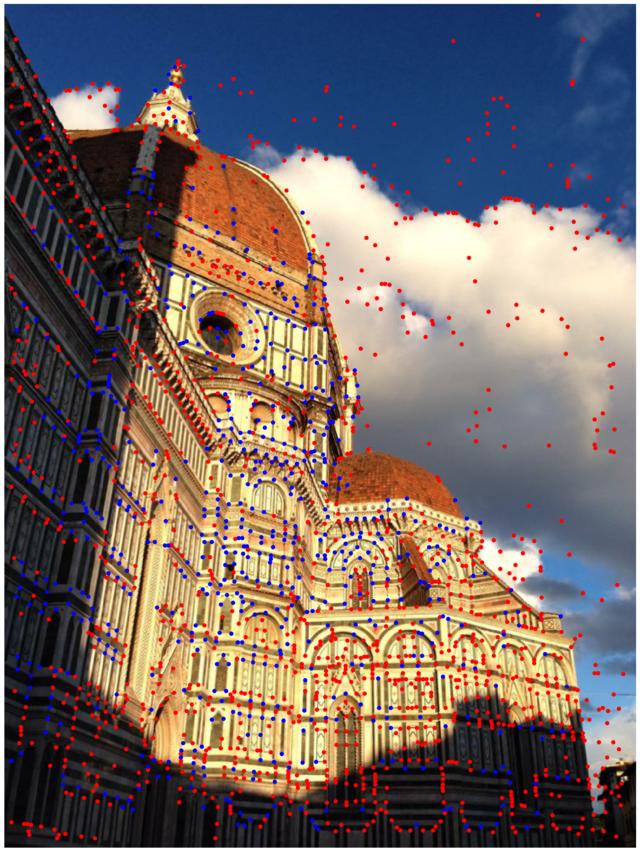
In the multi-view track we reconstruct the scene with Structure-from-Motion (Colmap) with small sets of images. We show the results for one bag of 10 images. Keypoints are drawn in blue if they are part of the model, and in red otherwise.
— British Museum —









— Florence Cathedral Side —







— Lincoln Memorial Statue —




— London Bridge —








— Milan Cathedral —









— Mount Rushmore —


— Piazza San Marco —










— Sagrada Familia —




— Saint Paul's Cathedral —










Prague Parks dataset / Stereo track
mAA at 10 degrees: 0.61559 (±0.00000 over 1 run(s) / ±0.05184 over 3 scenes)
Rank (per category): 45 (of 87)
| Scene | Features | Matches (raw) |
Matches (final) |
Rep. @ 3 px. | MS @ 3 px. | mAA(5o) | mAA(10o) |
| Lizard | 1488.2 | — | 106.8 | 0.028 Rank: 64/87 |
0.010 Rank: 40/87 |
0.40693 (±0.00000) Rank: 48/87 |
0.56990 (±0.00000) Rank: 48/87 |
| Pond | 2001.3 | — | 139.6 | 0.048 Rank: 54/87 |
0.049 Rank: 27/87 |
0.44088 (±0.00000) Rank: 47/87 |
0.58878 (±0.00000) Rank: 43/87 |
| Tree | 1896.6 | — | 88.2 | 0.028 Rank: 65/87 |
0.021 Rank: 46/87 |
0.54702 (±0.00000) Rank: 46/87 |
0.68808 (±0.00000) Rank: 46/87 |
| Avg | 1795.4 | — | 111.6 | 0.034 Rank: 65/87 |
0.027 Rank: 50/87 |
0.46495 (±0.00000) Rank: 47/87 |
0.61559 (±0.00000) Rank: 45/87 |
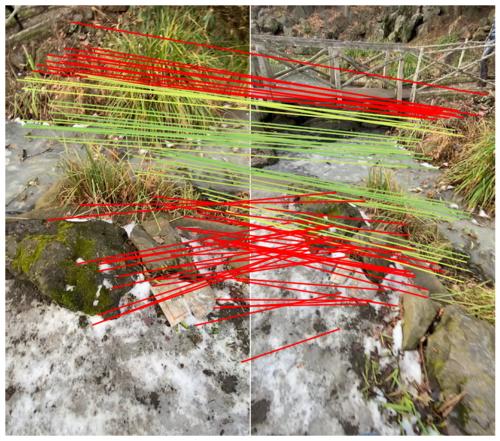
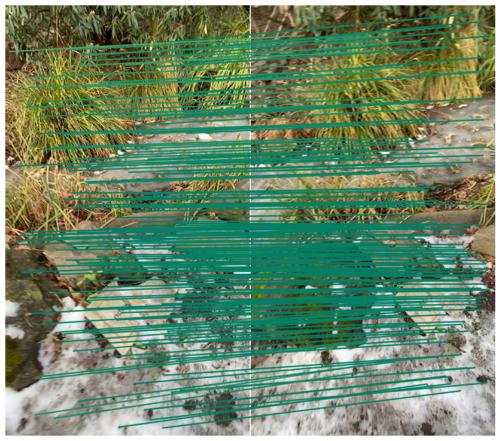
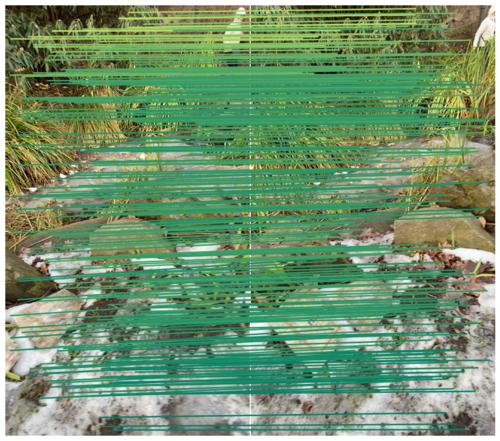
We show the inliers that survive the robust estimation loop (i.e. RANSAC), or those supplied with the submission if using custom matches, and use the depth estimates to determine whether they are correct. We draw matches above a 5-pixel error threshold in red, and those below are color-coded by their error, from 0 (green) to 5 pixels (yellow). Matches for which we do not have depth estimates are drawn in blue. Please note that the depth maps are estimates and may contain errors.
— Lizard —








— Pond —




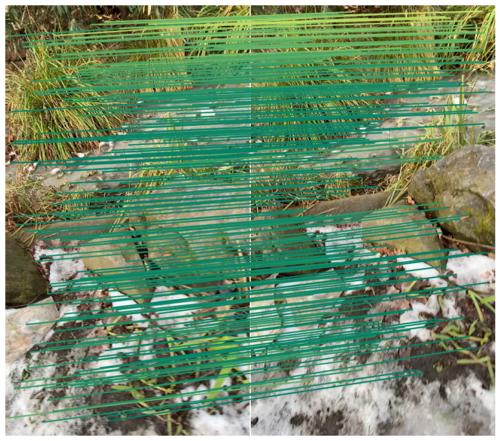
— Tree —









Prague Parks dataset / Multiview track
mAA at 10 degrees: N/A (±0.00000 over 1 run(s) / ±0.12932 over 3 scenes)
Rank (per category): 53 (of 87)
| Scene | Features | Matches (input) |
RegistrationRatio (%) | Number of Landmarks |
Track Length | ATE | mAA(50) | mAA(100) |
| Lizard | 1488.2 | 130.45 | 82.19 Rank: 60/87 |
508.52 Rank: 65/87 |
3.228 Rank: 61/87 |
14.08225 Rank: 25/87 |
0.50998 (±0.00000) Rank: 59/87 |
0.59402 (±0.00000) Rank: 59/87 |
| Pond | 2001.3 | 154.50 | 66.53 Rank: 60/87 |
384.93 Rank: 69/87 |
2.626 Rank: 69/87 |
0.41441 Rank: 9/87 |
0.25847 (±0.00000) Rank: 51/87 |
0.28160 (±0.00000) Rank: 55/87 |
| Tree | 1896.6 | 86.38 | 72.36 Rank: 10/87 |
269.02 Rank: 67/87 |
2.858 Rank: 63/87 |
5.74809 Rank: 11/87 |
0.43729 (±0.00000) Rank: 28/87 |
0.48310 (±0.00000) Rank: 24/87 |
| Avg | 1795.4 | 123.78 | 73.69 Rank: 58/87 |
387.49 Rank: 68/87 |
2.904 Rank: 68/87 |
6.74825 Rank: 17/87 |
0.40191 (±0.00000) Rank: 53/87 |
0.45291 (±0.00000) Rank: 53/87 |
In the multi-view track we reconstruct the scene with Structure-from-Motion (Colmap) with small sets of images. We show the results for one bag of 10 images. Keypoints are drawn in blue if they are part of the model, and in red otherwise.
— Lizard —



— Pond —





— Tree —



Google Urban dataset / Stereo track
mAA at 10 degrees: 0.31727 (±0.00000 over 1 run(s) / ±0.12514 over 17 scenes)
Rank (per category): 40 (of 87)
| Scene | Features | Matches (raw) |
Matches (final) |
mAA(5o) | mAA(10o) |
| Amsterdam (AMS) | 1727.7 | — | 113.1 | 0.13393 (±0.00000) Rank: 46/87 |
0.25580 (±0.00000) Rank: 46/87 |
| Bangkok (BGK) | 1240.5 | — | 123.3 | 0.04318 (±0.00000) Rank: 44/87 |
0.11811 (±0.00000) Rank: 47/87 |
| Barcelona (BCN) | 1185.7 | — | 104.3 | 0.08059 (±0.00000) Rank: 46/87 |
0.15824 (±0.00000) Rank: 43/87 |
| Buenos Aires (BAR) | 1239.2 | — | 95.5 | 0.16621 (±0.00000) Rank: 46/87 |
0.31507 (±0.00000) Rank: 39/87 |
| Cambridge (CAM) | 1196.3 | — | 83.0 | 0.20959 (±0.00000) Rank: 46/87 |
0.34555 (±0.00000) Rank: 43/87 |
| Cannes (CAN) | 1164.0 | — | 106.4 | 0.34378 (±0.00000) Rank: 39/87 |
0.45023 (±0.00000) Rank: 39/87 |
| Chicago (CHI) | 1178.6 | — | 58.6 | 0.14836 (±0.00000) Rank: 36/87 |
0.25260 (±0.00000) Rank: 36/87 |
| Helsinki (HEL) | 1337.2 | — | 175.8 | 0.27423 (±0.00000) Rank: 44/87 |
0.45644 (±0.00000) Rank: 45/87 |
| Madrid (MAD) | 1223.0 | — | 65.5 | 0.05593 (±0.00000) Rank: 43/87 |
0.13799 (±0.00000) Rank: 43/87 |
| Mountain View (MTV) | 1093.4 | — | 76.8 | 0.16133 (±0.00000) Rank: 39/87 |
0.28750 (±0.00000) Rank: 39/87 |
| New Orleans (NOR) | 1001.3 | — | 60.7 | 0.21834 (±0.00000) Rank: 39/87 |
0.31124 (±0.00000) Rank: 37/87 |
| San Francisco (SF) | 1163.6 | — | 86.5 | 0.16325 (±0.00000) Rank: 37/87 |
0.29738 (±0.00000) Rank: 36/87 |
| Singapore (SG) | 1175.7 | — | 87.3 | 0.24494 (±0.00000) Rank: 40/87 |
0.36234 (±0.00000) Rank: 40/87 |
| Sydney (SYD) | 1331.1 | — | 111.3 | 0.22009 (±0.00000) Rank: 42/87 |
0.36376 (±0.00000) Rank: 41/87 |
| Tokyo (TOK) | 1355.3 | — | 126.1 | 0.50637 (±0.00000) Rank: 39/87 |
0.66005 (±0.00000) Rank: 39/87 |
| Toronto (TOR) | 1287.7 | — | 80.3 | 0.16080 (±0.00000) Rank: 39/87 |
0.30000 (±0.00000) Rank: 39/87 |
| Zurich (ZRH) | 1156.6 | — | 102.0 | 0.23643 (±0.00000) Rank: 31/87 |
0.32131 (±0.00000) Rank: 35/87 |
| Average (Avg) | 1238.6 | — | 97.5 | 0.19808 (±0.00000) Rank: 41/87 |
0.31727 (±0.00000) Rank: 40/87 |
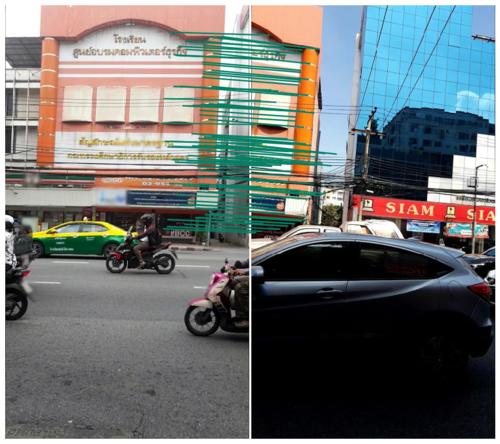
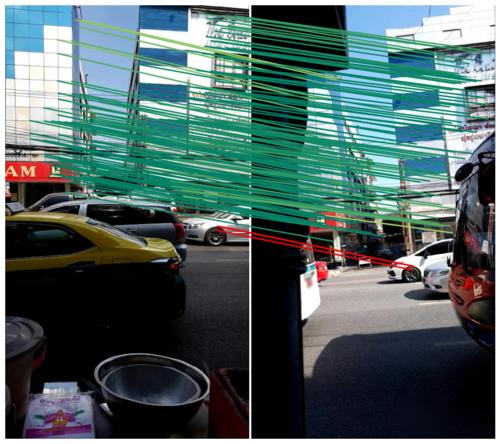
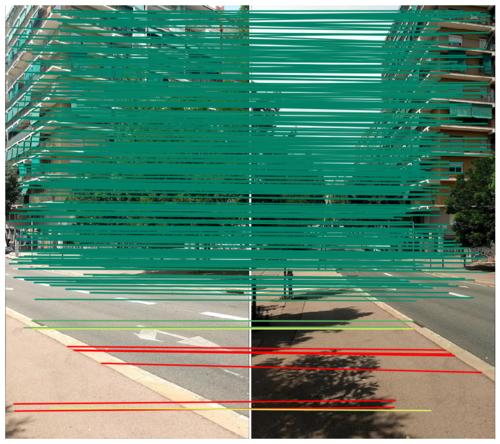
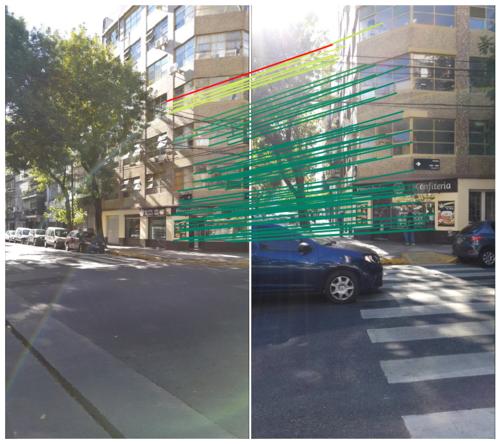
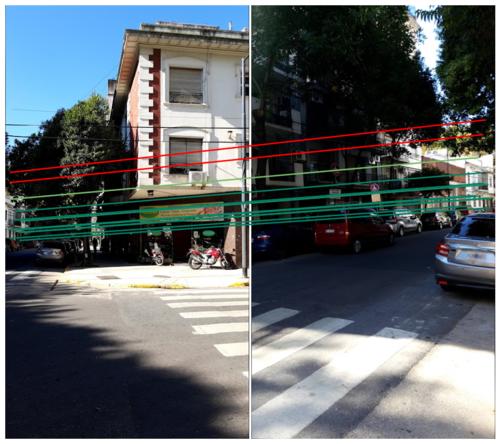
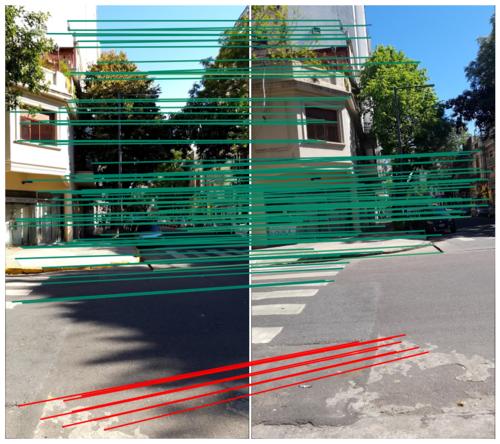
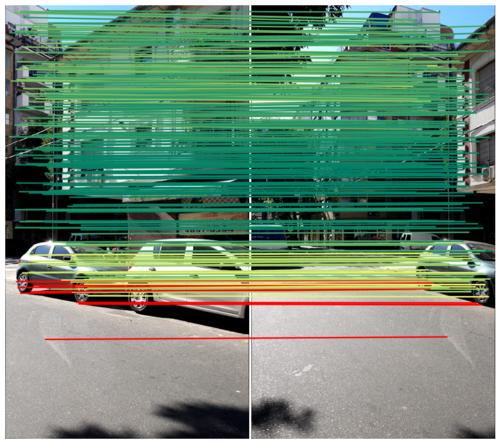
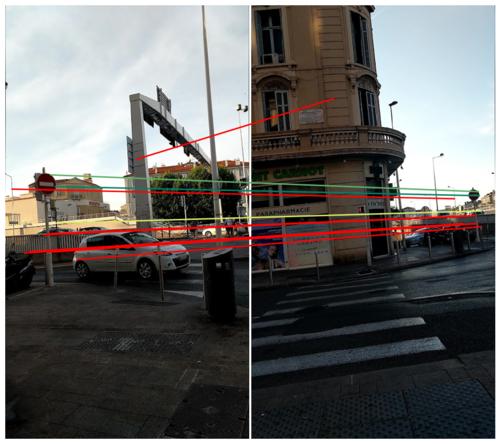
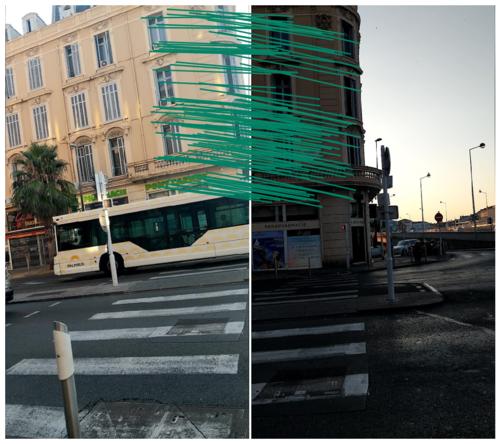
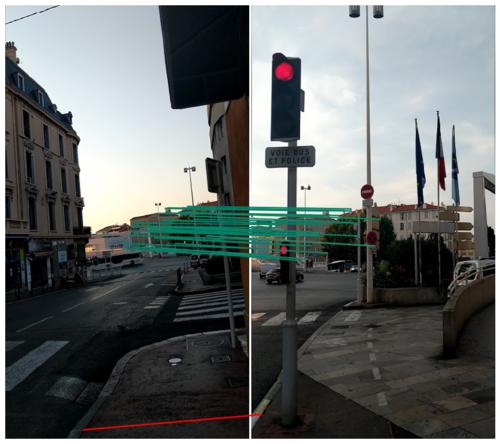
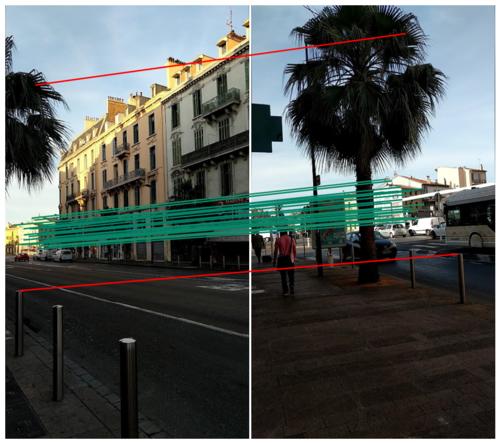
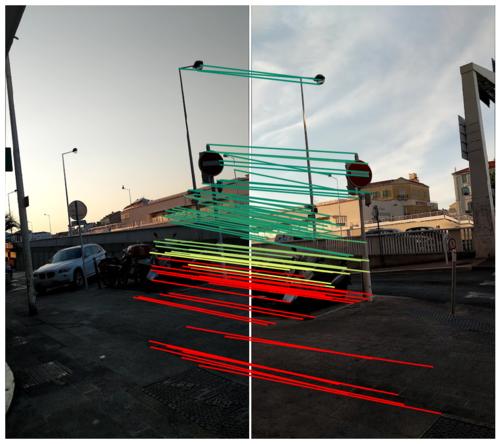
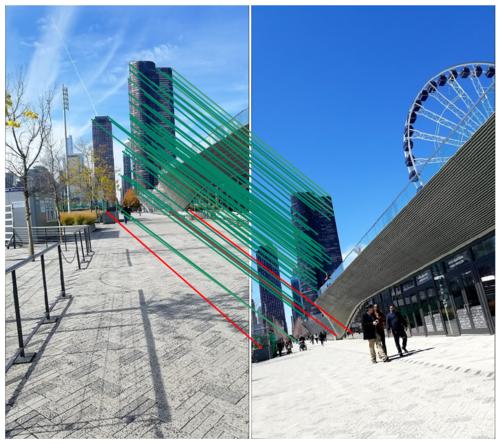
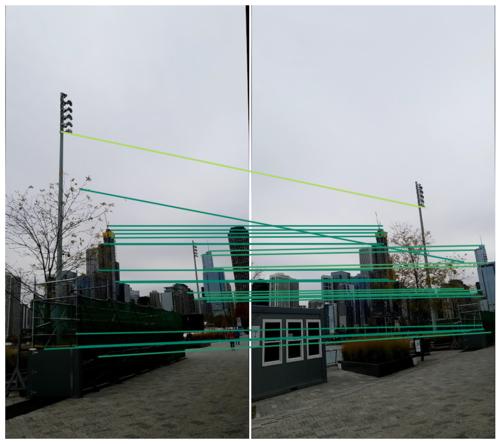
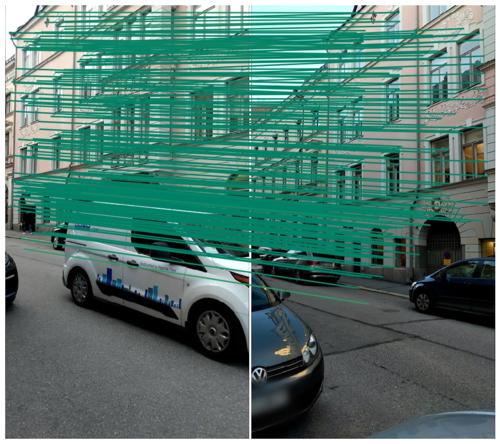
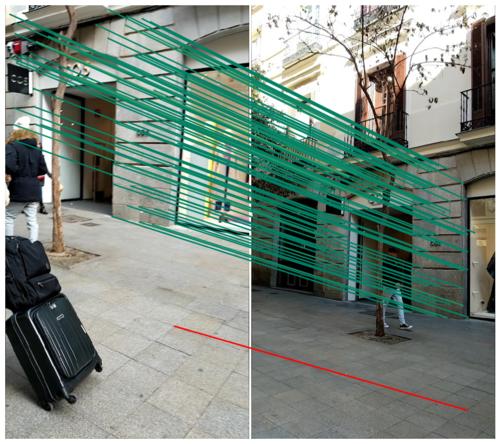
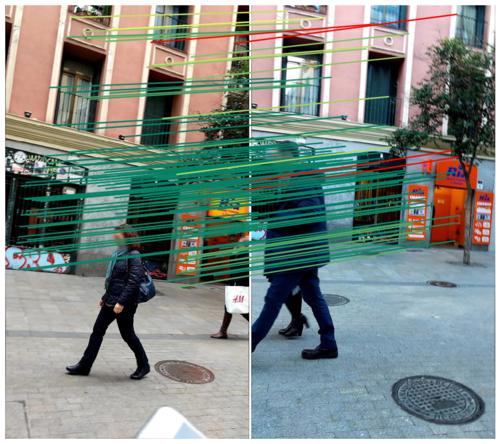
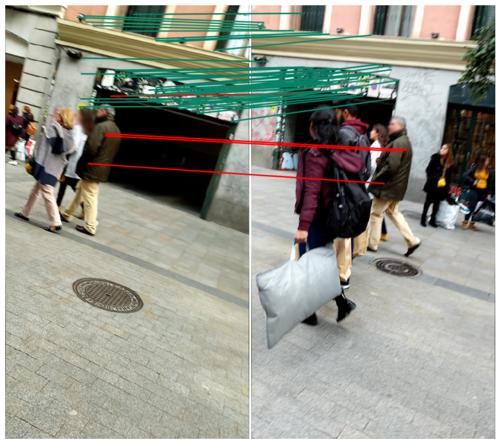
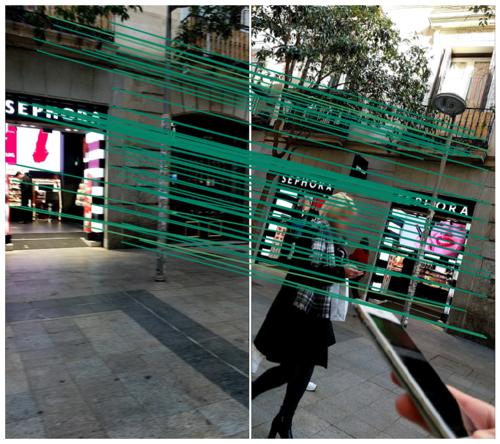
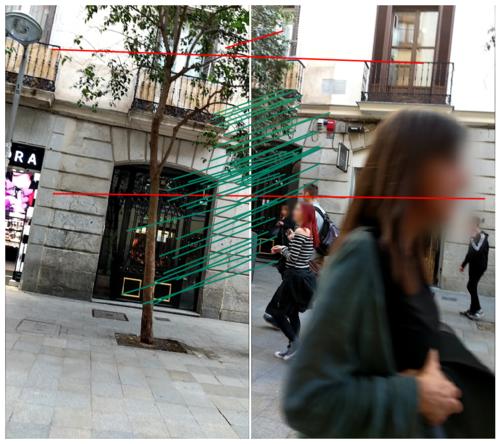
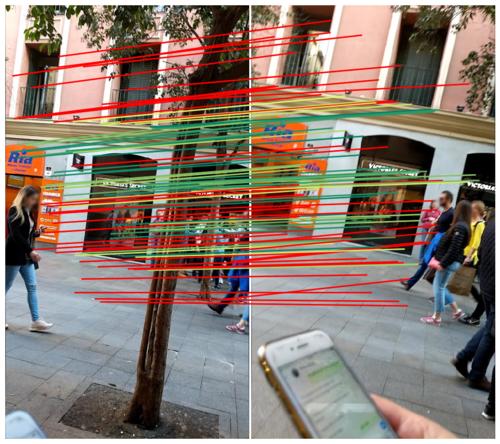
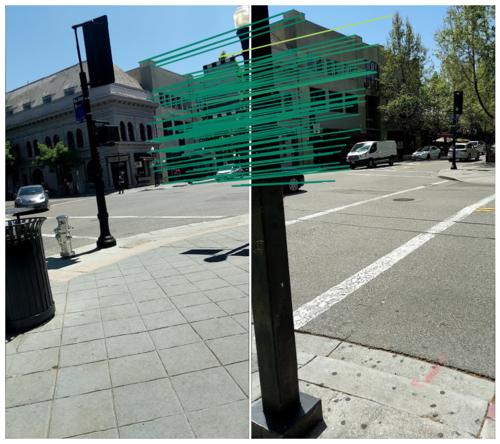
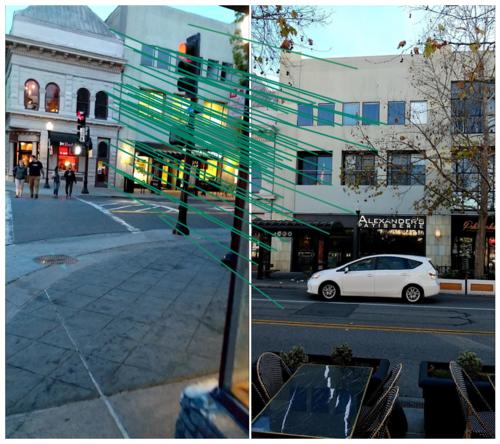
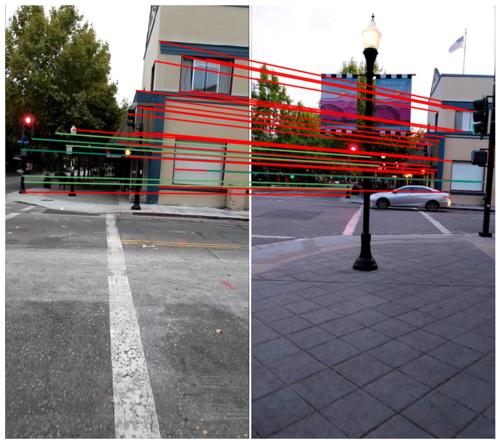
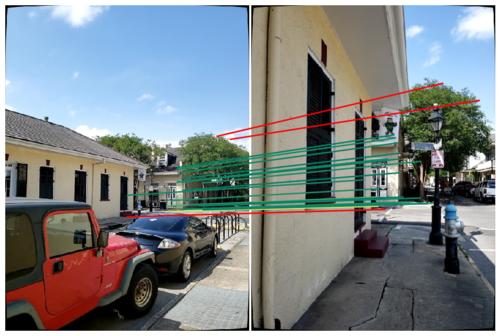
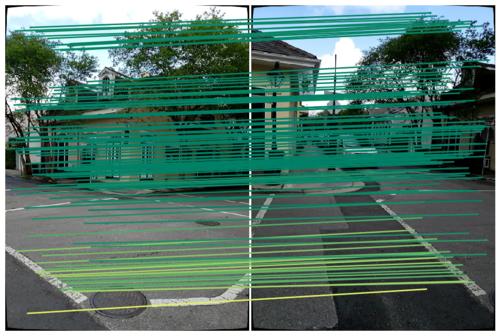
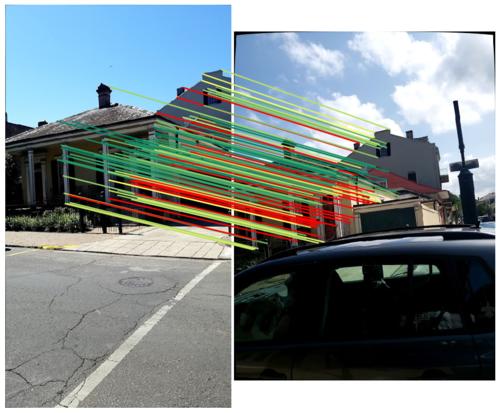
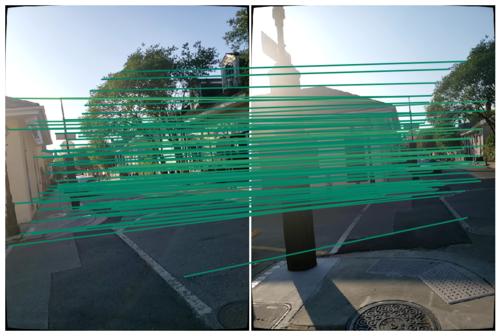
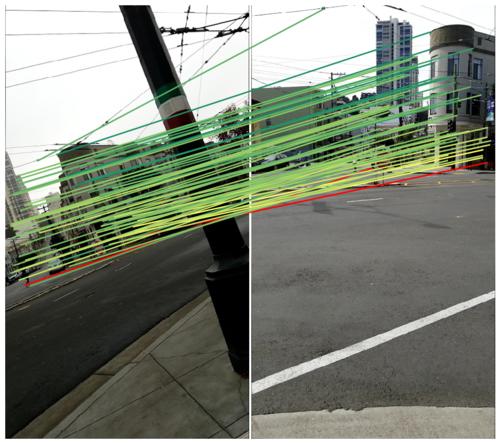
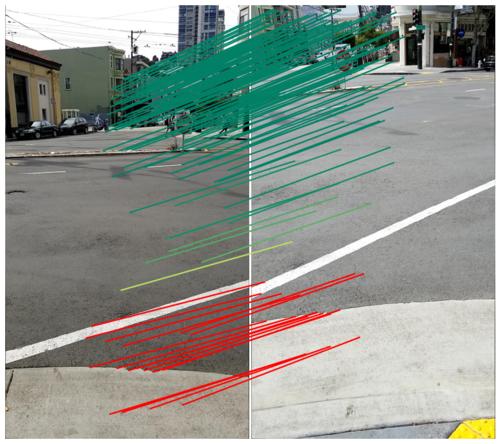
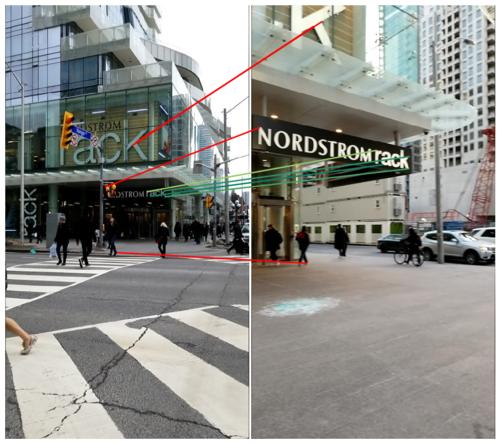
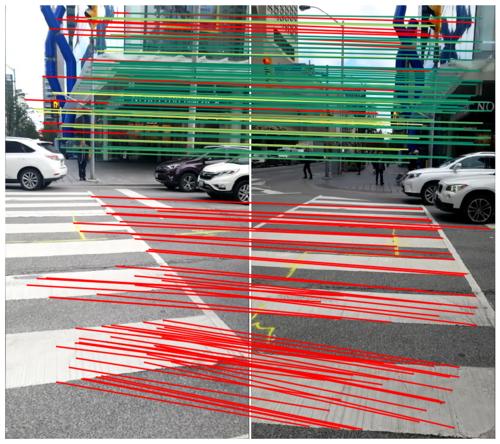
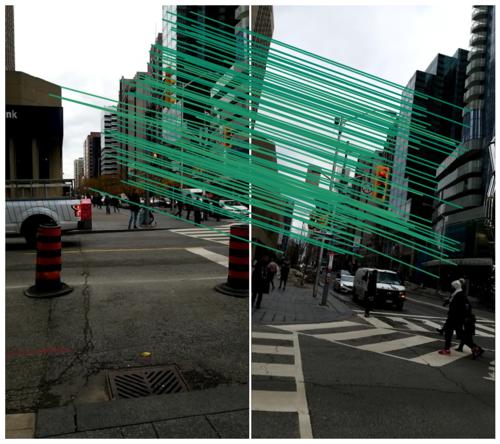
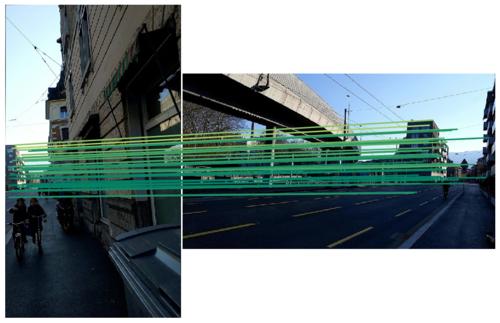
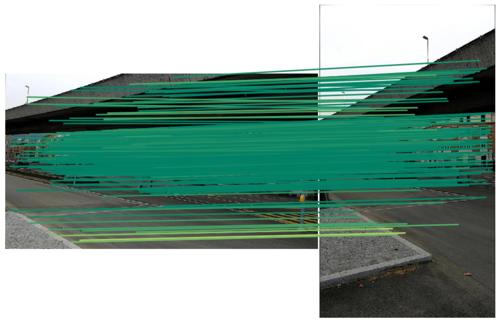
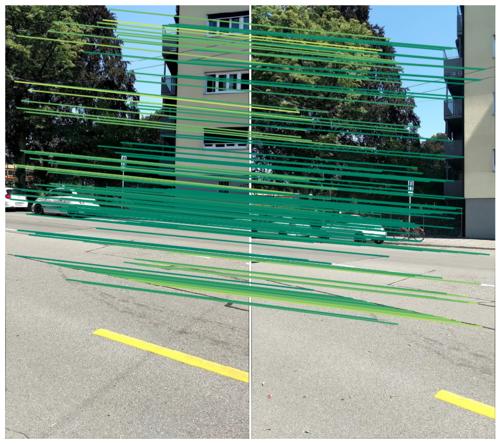
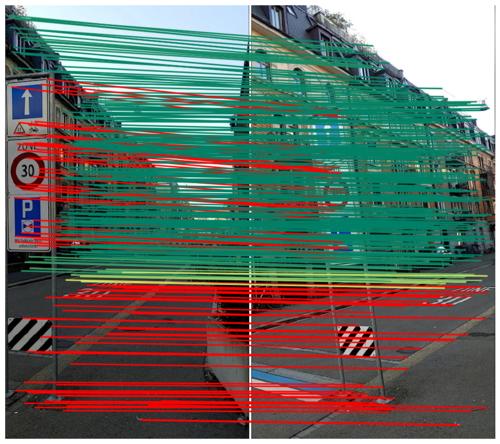
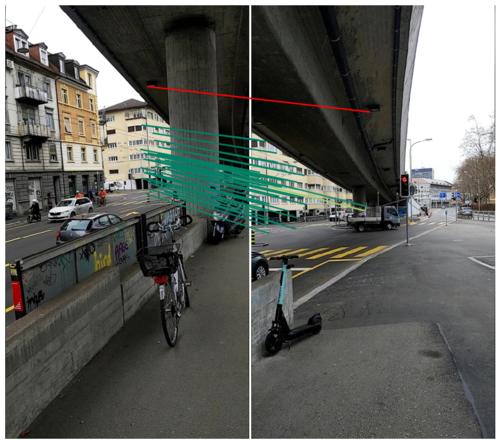
We show the inliers that survive the robust estimation loop (i.e. RANSAC), or those supplied with the submission if using custom matches. As the dataset does not contain depth, we color them based on the symmetric epopilar distance on normalized coordinates: from 0 (green) to 2e-4 (yellow), and in red above it. Note that these occasionally contain false positives.
— Amsterdam —








— Bangkok —






— Barcelona —








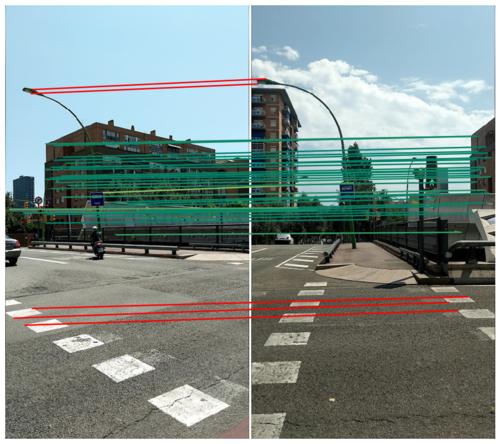
— Buenos Aires —





— Cambridge —







— Cannes —




— Chicago —





— Helsinki —




— Madrid —




— Mountain View —



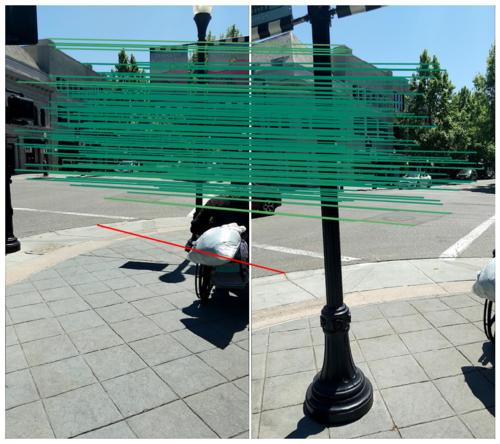



— New Orleans —


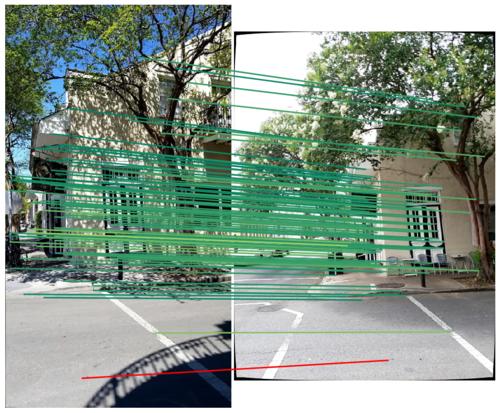

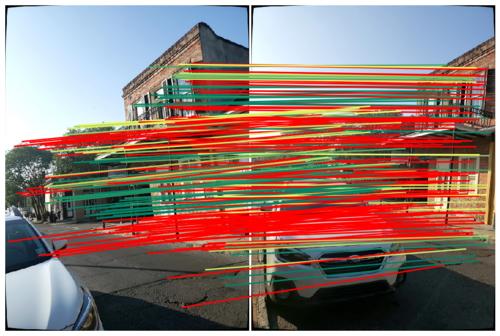

— San Francisco —






— Singapore —










— Sydney —





— Tokyo —







— Toronto —




— Zurich —
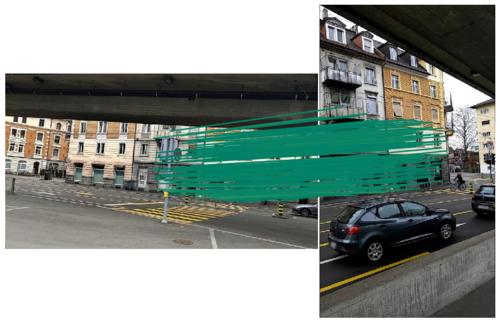



Google Urban dataset / Multiview track
mAA at 10 degrees: N/A (±0.00000 over 1 run(s) / ±0.14674 over 17 scenes)
Rank (per category): 42 (of 87)
| Scene | Features | Matches (input) |
RegistrationRatio (%) | Number of Landmarks |
Track Length | ATE | mAA(50) | mAA(100) |
| AMS | 1727.7 | 71.75 | 78.08 Rank: 44/87 |
678.69 Rank: 46/87 |
3.563 Rank: 44/87 |
21.00748 Rank: 10/87 |
0.28632 (±0.00000) Rank: 39/87 |
0.36319 (±0.00000) Rank: 42/87 |
| BGK | 1240.5 | 85.58 | 89.87 Rank: 48/87 |
970.15 Rank: 51/87 |
3.628 Rank: 34/87 |
10.75408 Rank: 5/87 |
0.02229 (±0.00000) Rank: 41/87 |
0.07107 (±0.00000) Rank: 43/87 |
| BCN | 1185.7 | 63.57 | 76.03 Rank: 44/87 |
576.45 Rank: 44/87 |
3.601 Rank: 39/87 |
22.87339 Rank: 11/87 |
0.08720 (±0.00000) Rank: 40/87 |
0.14034 (±0.00000) Rank: 41/87 |
| BAR | 1239.2 | 56.13 | 63.10 Rank: 46/87 |
334.33 Rank: 49/87 |
3.043 Rank: 46/87 |
12.18964 Rank: 10/87 |
0.06650 (±0.00000) Rank: 44/87 |
0.11510 (±0.00000) Rank: 44/87 |
| CAM | 1196.3 | 51.87 | 68.63 Rank: 48/87 |
408.45 Rank: 51/87 |
3.249 Rank: 45/87 |
14.69149 Rank: 5/87 |
0.10584 (±0.00000) Rank: 45/87 |
0.15362 (±0.00000) Rank: 47/87 |
| CAN | 1164.0 | 59.55 | 53.40 Rank: 50/87 |
234.56 Rank: 51/87 |
2.948 Rank: 50/87 |
8.59086 Rank: 3/87 |
0.01687 (±0.00000) Rank: 49/87 |
0.03751 (±0.00000) Rank: 49/87 |
| CHI | 1178.6 | 51.72 | 68.29 Rank: 47/87 |
166.12 Rank: 48/87 |
3.803 Rank: 46/87 |
39.44469 Rank: 4/87 |
0.04295 (±0.00000) Rank: 41/87 |
0.08769 (±0.00000) Rank: 42/87 |
| HEL | 1337.2 | 125.52 | 87.46 Rank: 47/87 |
1020.39 Rank: 51/87 |
3.903 Rank: 39/87 |
15.30655 Rank: 39/87 |
0.29524 (±0.00000) Rank: 37/87 |
0.42200 (±0.00000) Rank: 38/87 |
| MAD | 1223.0 | 43.96 | 79.78 Rank: 44/87 |
503.23 Rank: 47/87 |
3.341 Rank: 11/87 |
4.57018 Rank: 13/87 |
0.05529 (±0.00000) Rank: 39/87 |
0.12186 (±0.00000) Rank: 42/87 |
| MTV | 1093.4 | 53.84 | 84.98 Rank: 44/87 |
561.20 Rank: 48/87 |
3.811 Rank: 27/87 |
15.02112 Rank: 13/87 |
0.19554 (±0.00000) Rank: 40/87 |
0.30127 (±0.00000) Rank: 40/87 |
| NOR | 1001.3 | 40.73 | 57.14 Rank: 45/87 |
243.77 Rank: 48/87 |
2.745 Rank: 50/87 |
6.06464 Rank: 3/87 |
0.06747 (±0.00000) Rank: 44/87 |
0.10869 (±0.00000) Rank: 44/87 |
| SF | 1163.6 | 56.87 | 74.96 Rank: 47/87 |
464.35 Rank: 50/87 |
3.190 Rank: 48/87 |
13.54639 Rank: 6/87 |
0.12148 (±0.00000) Rank: 44/87 |
0.20082 (±0.00000) Rank: 45/87 |
| SG | 1175.7 | 54.83 | 61.29 Rank: 47/87 |
325.67 Rank: 51/87 |
3.161 Rank: 41/87 |
13.63785 Rank: 8/87 |
0.09410 (±0.00000) Rank: 44/87 |
0.13360 (±0.00000) Rank: 45/87 |
| SYD | 1331.1 | 68.34 | 69.35 Rank: 46/87 |
490.04 Rank: 46/87 |
3.102 Rank: 45/87 |
11.49121 Rank: 8/87 |
0.13553 (±0.00000) Rank: 43/87 |
0.19374 (±0.00000) Rank: 43/87 |
| TOK | 1355.3 | 76.83 | 87.96 Rank: 41/87 |
874.95 Rank: 49/87 |
3.729 Rank: 26/87 |
12.11109 Rank: 11/87 |
0.56541 (±0.00000) Rank: 40/87 |
0.63039 (±0.00000) Rank: 40/87 |
| TOR | 1287.7 | 50.67 | 79.44 Rank: 41/87 |
530.28 Rank: 43/87 |
3.211 Rank: 29/87 |
15.96611 Rank: 15/87 |
0.10316 (±0.00000) Rank: 41/87 |
0.18403 (±0.00000) Rank: 41/87 |
| ZRH | 1156.6 | 64.07 | 76.49 Rank: 43/87 |
709.77 Rank: 48/87 |
3.186 Rank: 46/87 |
17.63401 Rank: 18/87 |
0.06540 (±0.00000) Rank: 40/87 |
0.11669 (±0.00000) Rank: 40/87 |
| Avg | 1238.6 | 63.28 | 73.90 Rank: 44/87 |
534.85 Rank: 50/87 |
3.366 Rank: 45/87 |
14.99416 Rank: 9/87 |
0.13686 (±0.00000) Rank: 42/87 |
0.19892 (±0.00000) Rank: 42/87 |
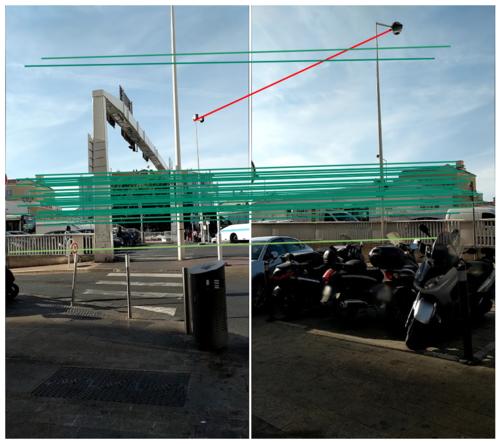
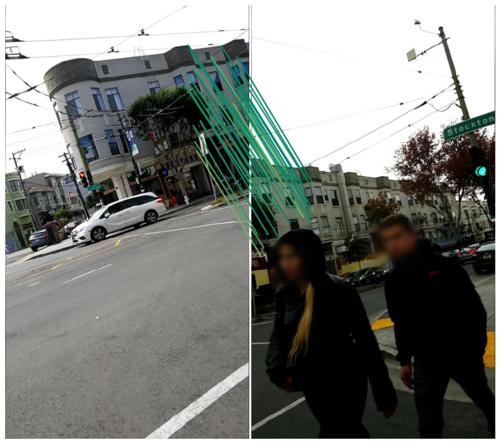
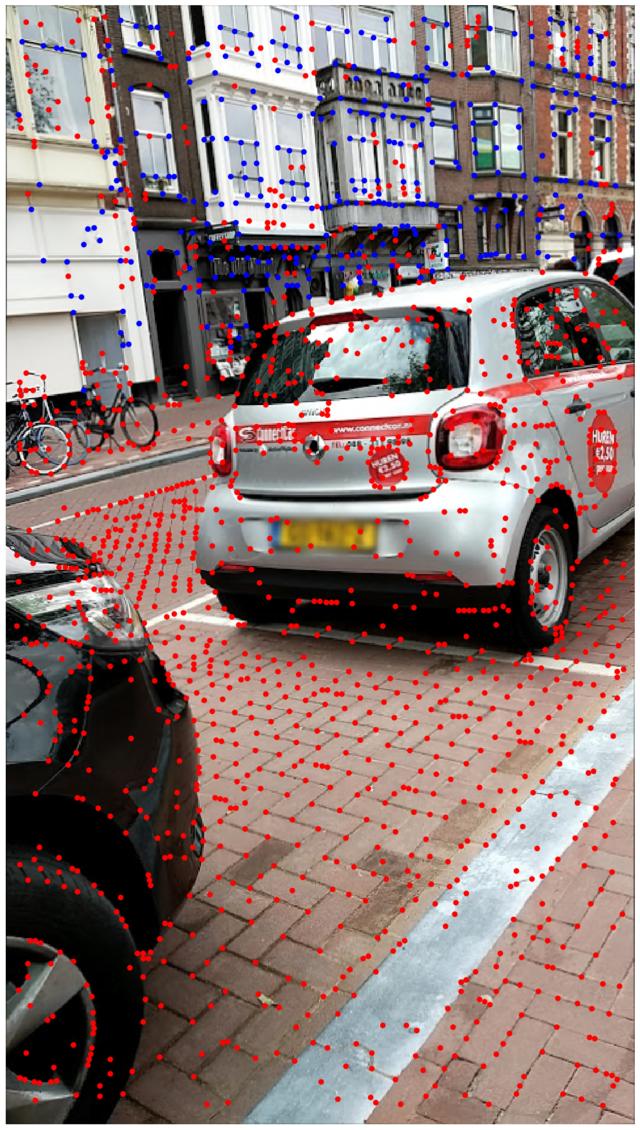
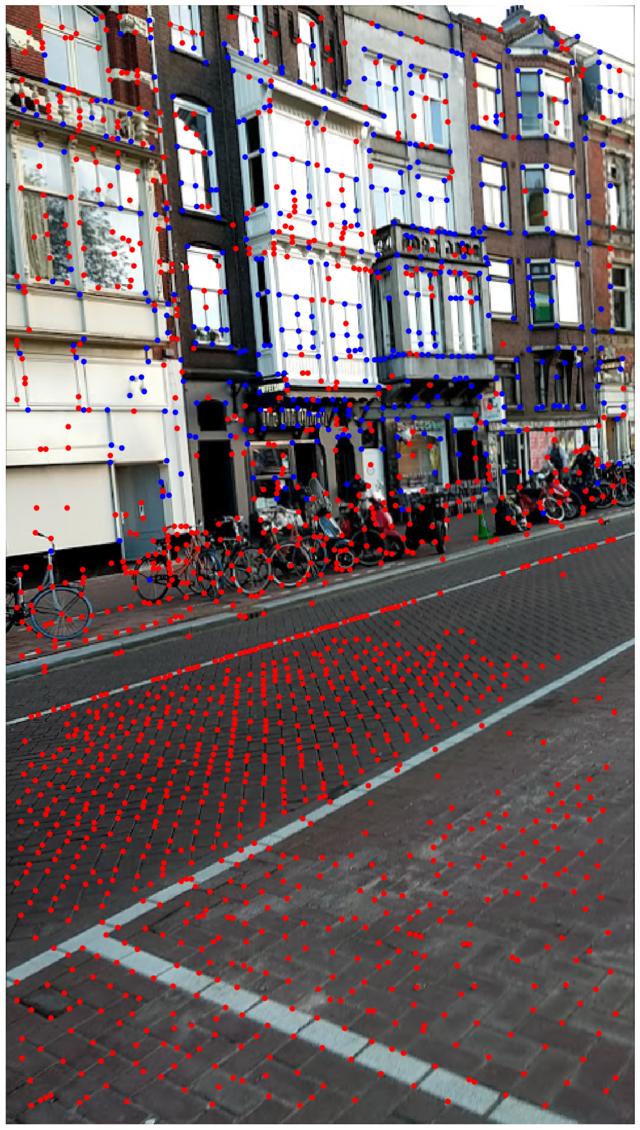
In the multi-view track we reconstruct the scene with Structure-from-Motion (Colmap) with small sets of images. We show the results for one bag of 10 images. Keypoints are drawn in blue if they are part of the model, and in red otherwise.
— Amsterdam —





— Bangkok —

— Barcelona —

— Buenos Aires —






— Cambridge —




— Cannes —


— Chicago —
— Helsinki —





— Madrid —





— Mountain View —



— New Orleans —


— San Francisco —


— Singapore —



— Sydney —







— Tokyo —


— Toronto —




— Zurich —