RoboBunting
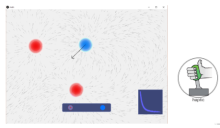
RoboBunting brings cat-like playfulness to robots through a simple furry paddle that users stroke, scratch, and pet while it gently pushes back in coordinated force exchanges. Inspired by feline behaviour, this minimalist haptic device acts as a lively leader or responsive follower by varying stiffness, motion speed, and timing to evoke social traits like extroversion, liveliness, and aliveness. The work paves the way for companion robots that deepen emotional bonds via natural bilateral touch dynamics, ideal for therapy or reducing isolation.