Research |
|
Current Research |
Alan
Mackworth's research program is focused on constraint-based
computational intelligence. We have developed a formal theory for the
design and implementation of constraint-based intelligent systems. Our
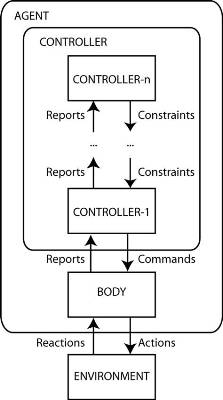
Constraint-Based agent (CBA) framework is a set of theoretical and practical
tools for designing, simulating, building, verifying, optimizing, learning
and debugging controllers for agents embedded in an active environment.
The agent and the environment are modelled symmetrically as, possibly
hybrid, systems in the Constraint Net (CN) dynamical systems language,
as developed in this research program. We are developing and applying
the CBA framework, emphasizing the important special case where the
agent is an online constraint-satisfying device. Here it is often possible
to verify complex agents as obeying real-time temporal constraint specifications
and, sometimes, to synthesize controllers automatically. The CBA framework
demonstrates the power of viewing constraint programming as the creation
of online constraint solvers for dynamic constraints.Our objectives
are to develop the theory further and to validate and improve it using
experimental implementations on varous robotic systems in our lab. The
experimental environment for this work includes the soccer-playing platforms
pioneered by us, a CBA Java environment and a set of mobile robots with
on-board real-time stereo and colour vision. |
 |
Most Significant Contributions to Research |
Alan Mackworth on Artificial Intelligence and Robotics |
|
Alan Mackworth pioneered in the development of Constraint Satisfaction Problems (CSPs) and Constraint Programming, important areas of activity in modern Computer Science and its applications. The central idea of Constraint Programming is to specify the constraints that a solution to a problem must satisfy, rather than details of how to satisfy them. This technology makes computers easier to program and use. Mackworth's ideas and algorithms are now used extensively in many constraint programming languages including CHIP, CHARME, CLP(FD), Newton, ILOG Solver, BNR Prolog and Echidna. These languages are widely used in commercial systems, developed by companies such as ILOG, for scheduling, simulation and diagnosis. Problems such as scheduling airline flights, ship movements and radio frequencies can be solved with this approach. It is the solution method of choice, dominating other approaches. More recent developments in this project include the Constraint Net model with parallel, distributed and on-line constraint satisfaction languages and algorithms that are being used to design and build robots and other agents. He has published over 120 research papers.
|
 |
Alan
Mackworth proposed and built the World’s
First Soccer-Playing Robots, which led to the development of robot
soccer as the premier global platform for multi-agent robotic research
through the International RoboCup Foundation, where he has been honoured
as “The Founding Father”. Robot soccer as
a challenge problem has great scientific significance. It has now become
a standard test environment for cross-testing research ideas: a forum
for evolving theories of multi-agent systems. Through regular international
RoboCup tournaments many research teams of students and professors compete
and cooperate in the development, testing and evolution of new theories
and new algorithms. |
 |
As
the founding Director of the UBC Laboratory
for Computational Intelligence, Alan Mackworth has
led the development of a world-renowned lab. He has also played, and is
playing, major leadership roles in the development of the Canadian Institute
for Advanced Research AI and Robotics Program, the Institute for Robotics
and Intelligent Systems (IRIS) NCE, Precarn, the UBC Institute for Computing,
Information and Cognitive Systems (ICICS) and the Intelligent Computational
Assistive Science and Technology (ICAST) network. |
In
addition to co-authoring a major new AI text covering state-of-the-art
research, Computational
Intelligence: A Logical Approach, Alan Mackworth
has co-developed CIspace,
a suite of new online research and teaching tools. |

|
In
collaboration with others, Alan Mackworth's work contributed
to the formation of a very successful UBC spinoff company, Point
Grey Research, with currently about 60 employees, which designs, manufactures
and sells digital imaging and robot stereo vision systems. |
 |
Recent Research Highlights |
Constraint
Satisfaction
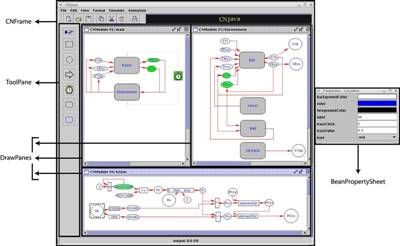
Alan Mackworth's work on the foundations of Constraint Satisfaction Problems (CSPs) continues to have a major impact. Our CSP and Constraint Programming models are both very influential. Our most recent results in this area are reported in [1, 2, 3, 4, 5, 6, 7]. Constraint Nets In a departure from offline models such as CSP and SAT we proposed Constraint Nets (CN), an online model of computation and a family of languages. CN connects the worlds of dynamic systems, computation, constraint programming, and formal specification/verification. This work is joint with Ying Zhang in an equal collaboration. The most recent development extends CN to Probabilistic Constraint Nets (PCN) [1, 2, 3]. Our implementation of CNJ [5] now provides a complete visual programming environment for CN and for PCN.
Alan Mackworth is the Originator of Robot Soccer as a major AI and robotics testbed. This has turned out to be a most significant idea: changing the paradigm. We also reported the first successful soccer system using a two-layer reactive-deliberation architecture, which was described in Arkin's textbook as the first of its kind. It has served as a template for many subsequent winning systems. Our recent work, using soccer as a test domain to shift the model of AI architecture from GOFAIR to Situated Agents, is described in [1, 2, 3]. Hybrid System Architecture We have proposed a unique unitary model of hybrid system architecture [1], based on our CN model. This is a unique contribution to the growing hybrid system community, developing new ways of designing, programming and verifying embedded hybrid systems - a critical application.
Our theory of Constraint-Based Agents (CBA) is the emerging synthesis of many years of development [1, 2]. CBA is a systematic treatment of the design issues for a class of agents in a dynamic environment. |
Copyright @ 2013 Pooyan Fazli |