Full citation
Davis, R., Martina-Ortiz, M., Schneider, O., MacLean, K. E., Okamura, A. M., Blikstein, P. "The Haptic Bridge: Towards a Theory of Haptic-Supported Learning." In Proceedings of the 16th International Conference on Interaction Design and Children (IDC'17). Stanford, CA, USA, 2017, pp. 51-60.
Thumbnail
Abstract
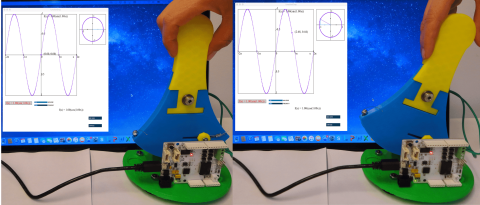
Haptic force feedback systems are unique in their ability to dynamically render physical representations. Although haptic devices have shown promise for supporting learning, prior work mainly describes results of haptic-supported learning without identifying underlying learning mechanisms. To this end, we designed a haptic-supported learning environment and analyzed four students who used it to make connections between two different mathematical representations of sine and cosine: the unit circle, and their graph on the Cartesian plane. We highlight moments where students made connections between the representations, and identify how the haptic feedback supported these moments of insight. We use this evidence in support of a proposed theoretical and design framework for educational haptics. This framework captures four types of haptic representations, and focuses on one -- the haptic bridge -- that effectively scaffolds sense-making with multiple representations.
Paper
SPIN Authors
Year Published
2017