ACM Transaction on Graphics (Proceedings of SIGGRAPH 2007)

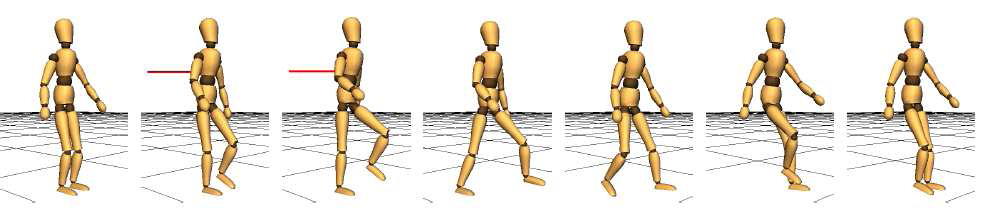
Real-time physics-based character simulation
with our framework. (top) A single controller for a planar biped
responds to unanticipated changes in terrain. (bottom) A walk
controller reconstructed from motion capture data responds to a
350N;0.2s diagonal push to the torso.
Physics-based simulation and control of biped locomotion is difficult because bipeds are unstable, underactuated, high-dimensional dynamical systems. We develop a simple control strategy that can be used to generate a large variety of gaits and styles in real-time, including walking in all directions (forwards, backwards, sideways, turning), running, skipping, and hopping. Controllers can be developed using motion capture data or can be authored using a small number of parameters. The controllers are applied to 2D and 3D physically-simulated character models. Their robustness is demonstrated with respect to pushes in all directions, unexpected steps and slopes, and unexpected variations in kinematic and dynamic parameters. Direct transitions between controllers are demonstrated as well as parameterized control of changes in direction and speed. Feedback-error learning is applied to learn predictive torque models, which allows for the low-gain control that typifies many natural motions as well as producing smoother simulated motion.
PDF (0.8M)
Java code (JSimbicon.zip)
More
QuickTime
Movies
author = {KangKang Yin and Kevin Loken and Michiel van de Panne},
title = {SIMBICON: Simple Biped Locomotion Control},
journal = {ACM Trans. Graph.},
year = {2007},
volume = {26},
number = {3},
}