Communicate Something
In this lab, I am adding a limb and some communicative behaviour to move the puppets from Lab 1Design Process
In this lab, we want to bring the ACre to life. As a creature, it should to be able to eat and be mobile enough to react to predators and search for food. With these fundamental skill sets, the ACre can hopefully learn to evolve and survive.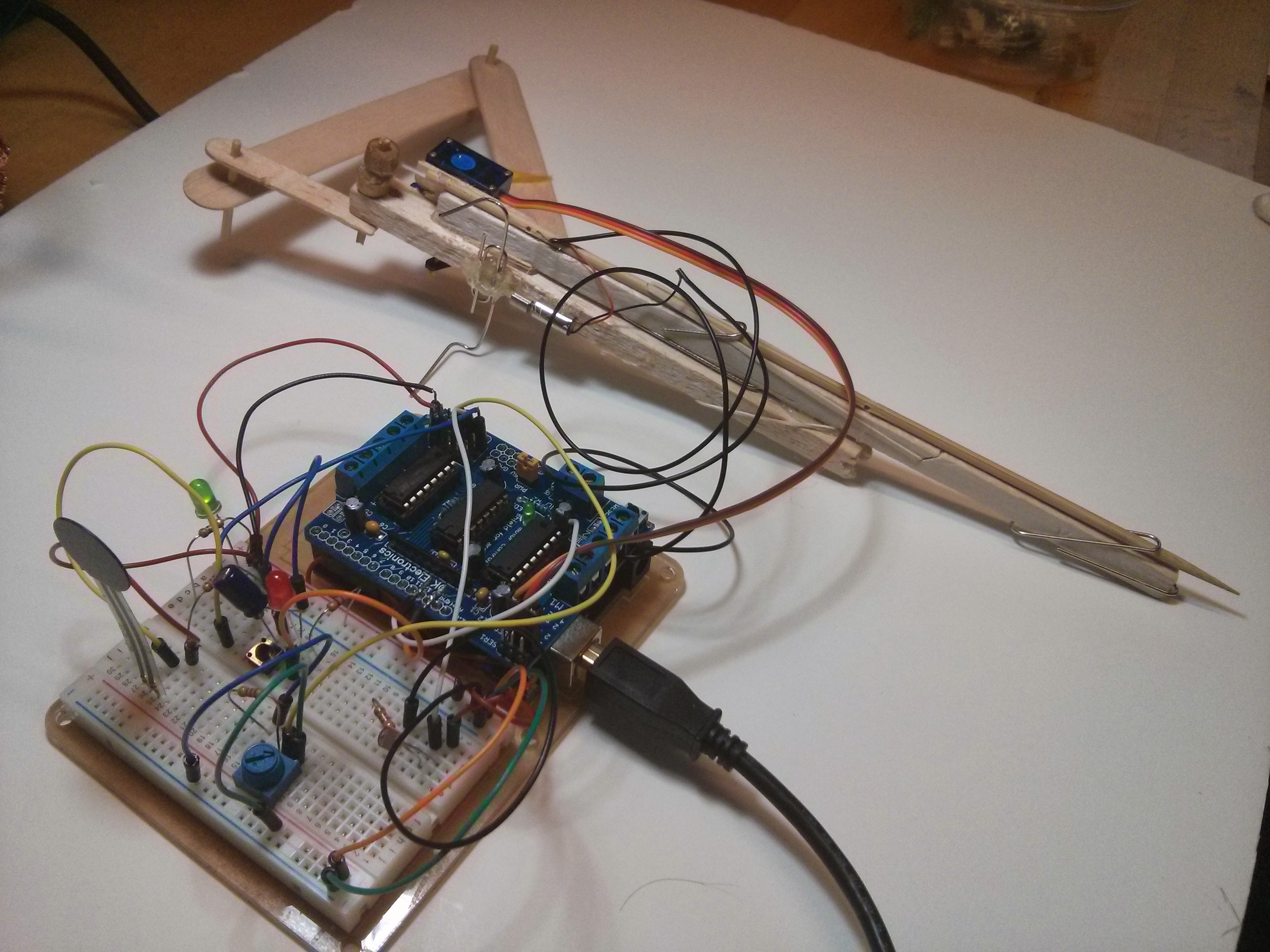
Move: Turn Crawl
To be able to move in the environment the ACre needed some limbs. The limbs were to be designed so that they could show primitive moving behaviour. Paper clips were used to mimic insect legs. Our initial idea was to use four limbs and hence four paper clips were attached as shown in figure below.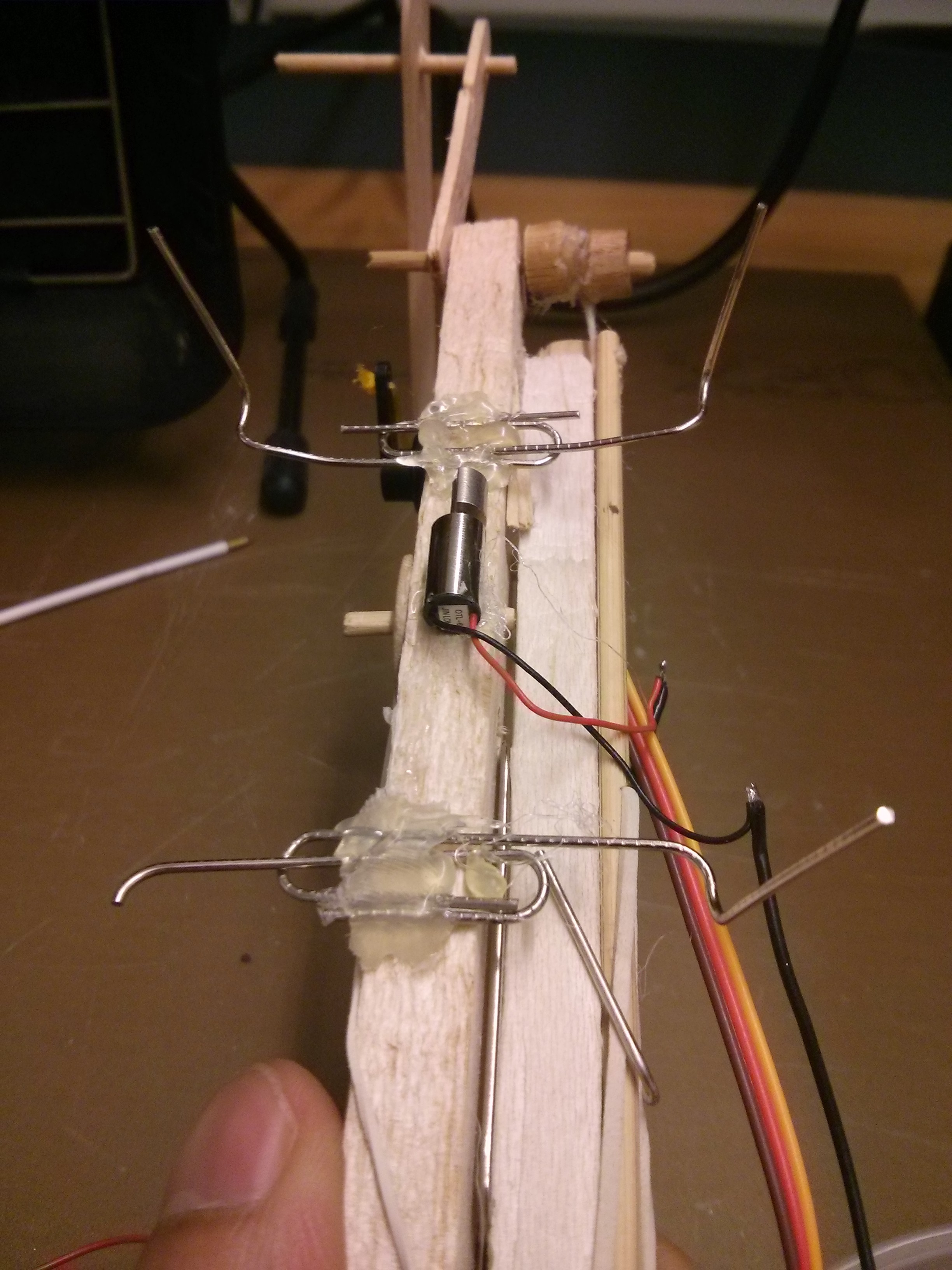 Actuating the limbs was done using a vibration motor mounted between front and rear limbs at the bottom surface of the ACre body. The vibration motor moved the ACre in different random directions. Varying speed of the vibration motor and adjusting the size of the limbs helped gain some consistency in motion. However, the primitive movements also required some direction ability so that the ACre can move in a particular direction and have a particular kind of motion based on occasion. The paper clips were usually bent multiple times and hence would usually break and iterating the movement on trail and error basis was time consuming. The picture above shows a rear limb broken at a bending point. To make the design simpler the limbs were reduced to two only.
Driving the vibration motor in a counter-clockwise direction was just enough to bring a consistent vibratory turning motion in the ACre. Ooohooo... now ACre can turn. To make the ACre move forward, I took inspiration from looping motion in caterpillars. I could use the ACre's head dexterity to make it crawl forward. The shape of the head being a little sawtooth-like in backward direction was useful in bringing this crawling movement.
Because the ACre is a only day creature, so it uses LDR sensor to sense if its bright and sunny to be going out. To switch between crawling forward and turning, we use a digital switch to mimic input as the ACre's intelligent decision to move forward or turn.
This video shows the ACre turning and crawling: http://www.youtube.com/watch?v=SeveCGAqjPg
Actuating the limbs was done using a vibration motor mounted between front and rear limbs at the bottom surface of the ACre body. The vibration motor moved the ACre in different random directions. Varying speed of the vibration motor and adjusting the size of the limbs helped gain some consistency in motion. However, the primitive movements also required some direction ability so that the ACre can move in a particular direction and have a particular kind of motion based on occasion. The paper clips were usually bent multiple times and hence would usually break and iterating the movement on trail and error basis was time consuming. The picture above shows a rear limb broken at a bending point. To make the design simpler the limbs were reduced to two only.
Driving the vibration motor in a counter-clockwise direction was just enough to bring a consistent vibratory turning motion in the ACre. Ooohooo... now ACre can turn. To make the ACre move forward, I took inspiration from looping motion in caterpillars. I could use the ACre's head dexterity to make it crawl forward. The shape of the head being a little sawtooth-like in backward direction was useful in bringing this crawling movement.
Because the ACre is a only day creature, so it uses LDR sensor to sense if its bright and sunny to be going out. To switch between crawling forward and turning, we use a digital switch to mimic input as the ACre's intelligent decision to move forward or turn.
This video shows the ACre turning and crawling: http://www.youtube.com/watch?v=SeveCGAqjPgEat : Quick Pick
This behaviour is a direct extension of Lab 2Scared : Run Away
The ACre has a head and limbs. When it would be scared in a scenario, the first response would be evident in head (assuming they have sensors on head to access danger). A shocked impromptu head backwards movement, followed by a moving backward action and slowly bringing the head forward after a relief. This series of actions was tested to see scared and run away behavior. To actuate this behaviour, a simple button interface was used as a trigger. This video shows the ACre anxious/excited/scared and moving backward : http://www.youtube.com/watch?v=SffMGGnoGBY&feature=youtu.beReflection
In this lab, I wanted to bring add some communicative behavior in the ACre. I am envisioning this creature to be on a table within attentional ambience of its users. Its basic actions can also be associated with behaviors of joyful playful mood, boredome and fear. Moving and turning around behavior can be associated with joyful playful mood. Eating behavior appears to be like a dull and boring mundane behavior of the creature because its sitting in one place and nodding its head on food like "a lazy couch-potato". The scared behavior associates to a feeling of fear or some negative energy. At the end of this lab, the ACre has basic living creature behavior inspired from other creatures in nature. Its behaviors somewhat express what it is trying to do and how it is feeling. -- BikramAdhikari - 14 Feb 2014

| I | Attachment | History | Action | Size | Date | Who | Comment |
|---|---|---|---|---|---|---|---|
| |
disaster.jpg | r1 | manage | 1173.2 K | 2014-02-14 - 17:14 | BikramAdhikari | |
| |
image.jpg | r1 | manage | 1509.5 K | 2014-02-14 - 17:01 | BikramAdhikari |
Topic revision: r1 - 2014-02-14 - BikramAdhikari

{kind=link}
{kind=link}
Ideas, requests, problems regarding TWiki? Send feedback