Difference: BikramAdhikariSandbox (1 vs. 4)
Revision 42014-02-07 - BikramAdhikari
| Line: 1 to 1 | ||||||||
|---|---|---|---|---|---|---|---|---|
Lab 1In this lab, we design 3 puppets that can actuate at 1mm, 10mm and 100mm. Given below is a description to each individual action puppets | ||||||||
| Added: | ||||||||
| > > | Click here | |||||||
1mm Poker PuppetThis actuator is based on eccentric cam mechanism. There is a lever attached to the top of the cam shaft. This lever can only move in a distance ranging between minimum and maximum radius of the cam shaft. I have designed the difference to be approximately 1mm. This lever has a pen connected to it which bores on to the base plate. | ||||||||
| Changed: | ||||||||
| < < | 
 | |||||||
| > > |
| |||||||
| Action When the cam shaft rotates, the lever oscilates within 1mm distance. This oscillation is transferred as linear motion on to the pen. This pen only pops out (or pokes out) of the base plate when the cam shaft is at its minimum diameter position. These two extreme cam shaft positions are shown in the images below. | ||||||||
| Changed: | ||||||||
| < < | 
 | |||||||
| > > |
| |||||||
See video here: http://www.youtube.com/watch?v=2-08aaWPc2M&feature=youtu.be10mm Pen PuppetThis design transfer small circular motion to linear action. The total displacement is about 10mm. The rotatory shaft can rotate on one direction until the string is completely unwounded from the shaft. In the other direction, it can rotate only up to the position where the linear shaft's string lock is on its top. The rotatory shaft uses friction based locking mechanism to lock the linear shaft at a particular position. This design is inspired from traditional Nepalese instrument called "Sarangi". | ||||||||
| Changed: | ||||||||
| < < | 

 | |||||||
| > > |
| |||||||
| Action In the following images, the two extreme positions of the rotatory shaft are shown. Correspondingly, we can observe the displacement of the linear shaft to be around 10mm. | ||||||||
| Changed: | ||||||||
| < < | 
 | |||||||
| > > |
| |||||||
|
See Video here: http://www.youtube.com/watch?v=1uL_xB_lVZE&index=5&list=PLFNjF5XN33kHVeIN8pdtEKfSgrSi6UhiO | ||||||||
| Line: 42 to 43 | ||||||||
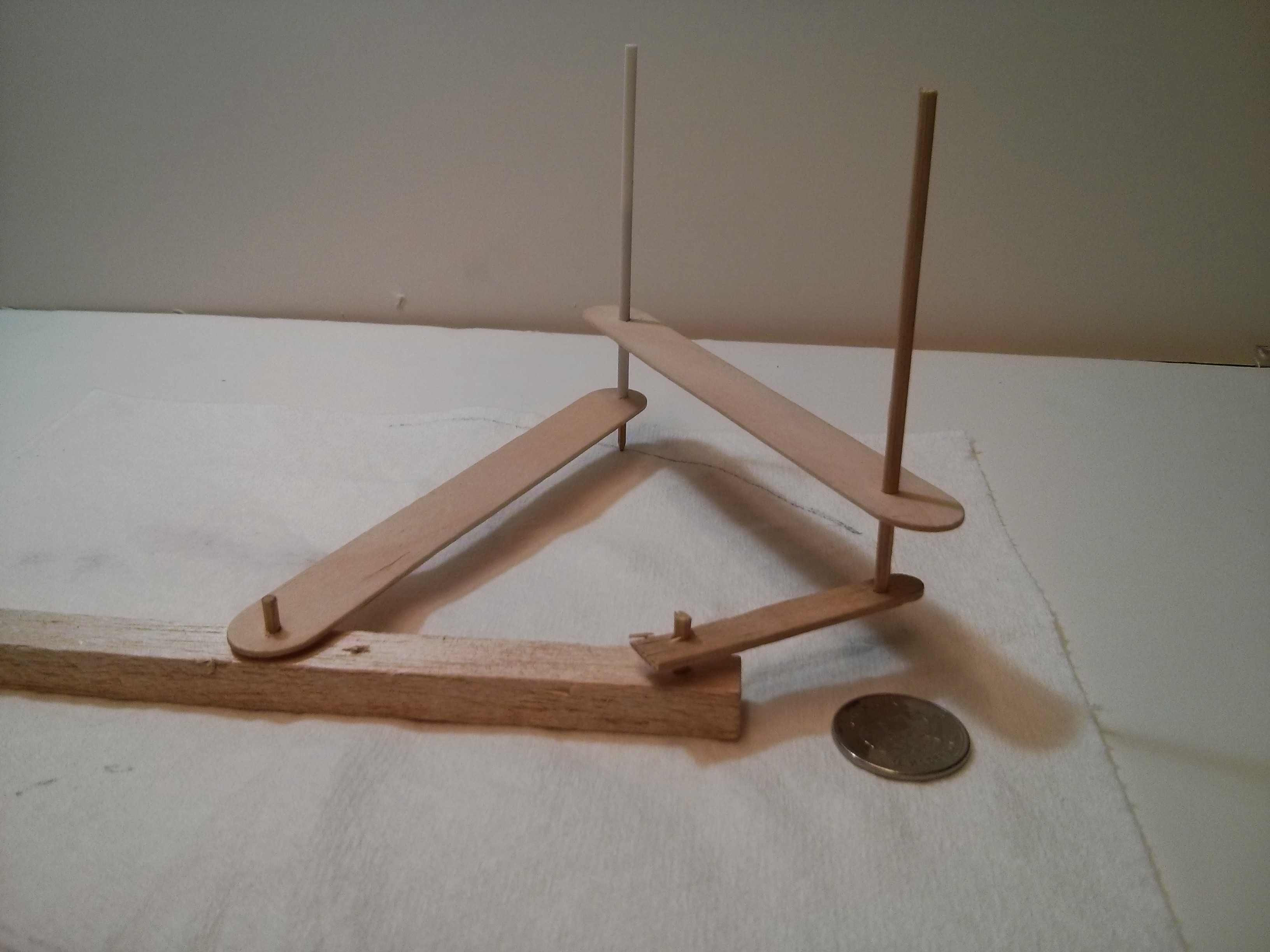
| This arch puppet transfer circular motion of small radius to an arch motion of larger radius. The small rotating link was designed to half approximately half the radius of large rotating link. The connecting link between the two rotating links is arbitrarily chosen. In this design, the spacing between to rotating links on the base was varied to achieve approximately 100mm arch motion. | ||||||||
| Changed: | ||||||||
| < < | 
 | |||||||
| > > |
| |||||||
| Action: This image shows puppet half way between two extremities. The end effector is a pen which draws on the paper as shown | ||||||||
| Changed: | ||||||||
| < < |  | |||||||
| > > | | |||||||
|
See video here: https://www.youtube.com/watch?v=3G-MnAZegX0&list=PLFNjF5XN33kHVeIN8pdtEKfSgrSi6UhiO | ||||||||
Revision 32014-02-07 - BikramAdhikari
| Line: 1 to 1 | ||||||||
|---|---|---|---|---|---|---|---|---|
Lab 1In this lab, we design 3 puppets that can actuate at 1mm, 10mm and 100mm. Given below is a description to each individual action puppets | ||||||||
Revision 22014-01-31 - BikramAdhikari
| Line: 1 to 1 | |||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| |||||||||||||||||||||||||||||||||
| Changed: | |||||||||||||||||||||||||||||||||
| < < | This is a test web page | ||||||||||||||||||||||||||||||||
| > > | Lab 1In this lab, we design 3 puppets that can actuate at 1mm, 10mm and 100mm. Given below is a description to each individual action puppets1mm Poker PuppetThis actuator is based on eccentric cam mechanism. There is a lever attached to the top of the cam shaft. This lever can only move in a distance ranging between minimum and maximum radius of the cam shaft. I have designed the difference to be approximately 1mm. This lever has a pen connected to it which bores on to the base plate.
Action
When the cam shaft rotates, the lever oscilates within 1mm distance. This oscillation is transferred as linear motion on to the pen. This pen only pops out (or pokes out) of the base plate when the cam shaft is at its minimum diameter position. These two extreme cam shaft positions are shown in the images below.
See video here: http://www.youtube.com/watch?v=2-08aaWPc2M&feature=youtu.be10mm Pen PuppetThis design transfer small circular motion to linear action. The total displacement is about 10mm. The rotatory shaft can rotate on one direction until the string is completely unwounded from the shaft. In the other direction, it can rotate only up to the position where the linear shaft's string lock is on its top. The rotatory shaft uses friction based locking mechanism to lock the linear shaft at a particular position. This design is inspired from traditional Nepalese instrument called "Sarangi".
Action
In the following images, the two extreme positions of the rotatory shaft are shown. Correspondingly, we can observe the displacement of the linear shaft to be around 10mm.
See Video here: http://www.youtube.com/watch?v=1uL_xB_lVZE&index=5&list=PLFNjF5XN33kHVeIN8pdtEKfSgrSi6UhiO100mm Arch PuppetThis arch puppet transfer circular motion of small radius to an arch motion of larger radius. The small rotating link was designed to half approximately half the radius of large rotating link. The connecting link between the two rotating links is arbitrarily chosen. In this design, the spacing between to rotating links on the base was varied to achieve approximately 100mm arch motion.
Action:
This image shows puppet half way between two extremities. The end effector is a pen which draws on the paper as shown
See video here: https://www.youtube.com/watch?v=3G-MnAZegX0&list=PLFNjF5XN33kHVeIN8pdtEKfSgrSi6UhiO | ||||||||||||||||||||||||||||||||
| -- BikramAdhikari - 21 Jan 2014 | |||||||||||||||||||||||||||||||||
| Added: | |||||||||||||||||||||||||||||||||
| > > |
| ||||||||||||||||||||||||||||||||
Revision 12014-01-21 - BikramAdhikari
| Line: 1 to 1 | ||||||||
|---|---|---|---|---|---|---|---|---|
| Added: | ||||||||
| > > |
| |||||||
View topic | History: r4 < r3 < r2 < r1 | More topic actions...
Ideas, requests, problems regarding TWiki? Send feedback