Does the Choice of Action Space Matter?
Xue Bin Peng Michiel van de Panne
University of British Columbia
ACM SIGGRAPH / Eurographics Symposium on Computer Animation 2017
Best Student Paper
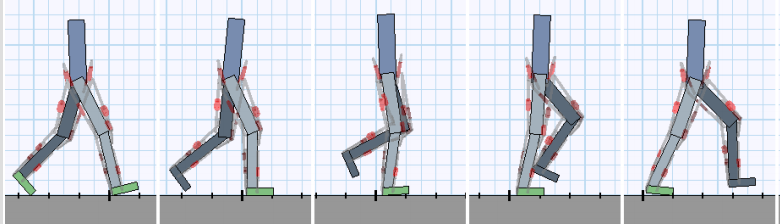
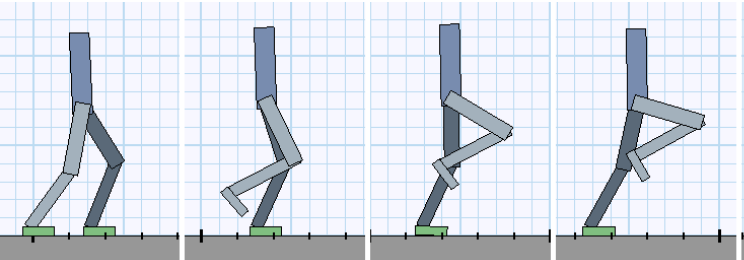
The use of deep reinforcement learning allows for high-dimensional state descriptors, but little is known about how the choice of action representation impacts the learning difficulty and the resulting performance. We compare the impact of four different action parameterizations (torques, muscle-activations, target joint angles, and target joint-angle velocities) in terms of learning time, policy robustness, motion quality, and policy query rates. Our results are evaluated on a gaitcycle imitation task for multiple planar articulated figures and multiple gaits. We demonstrate that the local feedback provided by higher-level action parameterizations can significantly impact the learning, robustness, and quality of the resulting policies.
Also presentation at the NIPS 2016 Deep Reinforcement Learning Workshop (Dec 2016, Barcelona)
@inproceedings{2017-SCA-action,
title={Learning Locomotion Skills Using DeepRL: Does the Choice of Action Space Matter?}
author={Peng, Xue Bin and van de Panne, Michiel},
booktitle = {Proc. ACM SIGGRAPH / Eurographics Symposium on Computer Animation},
year={2017}
}