To appear in ACM Transaction on Graphics (Proceedings of SIGGRAPH ASIA 2008)
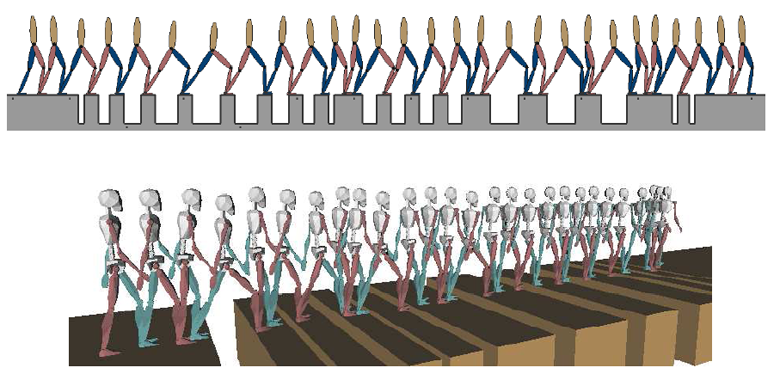
A step-to-step dynamic model is used by an online planner to navigate across constrained terrain.
Simulated characters in simulated worlds require simulated skills. We develop control strategies that enable physically-simulated characters to dynamically navigate environments with significant stepping constraints, such as sequences of gaps. We present a synthesis-analysis-synthesis framework for this type of problem. First, an offline optimization method is applied in order to compute example control solutions for randomly-generated example problems from the given task domain. Second, the example motions and their underlying control patterns are analyzed to build a low-dimensional step-to-step model of the dynamics. Third, this model is exploited by a planner to solve new instances of the task at interactive rates. We demonstrate real-time navigation across constrained terrain for physics-based simulations of 2D and 3D characters. Because the framework sythesizes its own example data, it can be applied to bipedal characters for which no motion data is available.
More
Examples
author = {Stelian Coros and Philippe Beaudoin and KangKang Yin and Michiel van de Panne},
title = {Synthesis of Constrained Walking Skills},
journal = {ACM Trans. Graph. (Proc. Siggraph Asia)},
year = {2008},
volume = {XX},
number = {X},
}