Submission ID: 00612
SuperPoint-128d-adapt + SuperGlue + DEGENSAC
Processed: 20-05-31. Download link: sid-00612-sp-k2048-nms4-refine2-r1600forcecubic-down128-masked-d.001-adapt50_sg-t.2-it150_degensac-th1.1.json
This page ranks the submission against all others using the same number of keypoints, regardless of descriptor size. Please hover over table headers for descriptions on metrics and full scene names.
Metadata
- Authors: Paul-Edouard Sarlin (contact)
- Keypoint: superpoint-k2048-nms4-refine2-r1600forcecubic-masked-d.001-adapt50
- Descriptor: superpoint-down128 (128 float32: 512 bytes)
- Number of features: 2048
- Summary: SuperPoint detector (2048 keypoints, NMS with radius 4, confidence threshold 0.001, refinement, on 1600-pixel images). The detection heatmap is improved with test-time homographic adaptation (50 iterations), and detections on semantic classes sky and people are removed (segmentation from HFNetV2 trained on MIT ADE20K). SuperPoint descriptor, reduced to 128d with a linear autoencoder. SuperGlue matcher (outdoor model, 150 Sinkhorn iterations). For stereo, DEGENSAC model estimator (1.1 pixel inlier threshold).
- Paper: https://arxiv.org/abs/1911.11763
- Website: https://psarlin.com/superglue
- Origin: Submission
- Flags: is_submission, is_challenge_2020
Phototourism / Stereo track
mAA at 10 degrees: 0.59034 (±0.00050 over 3 run(s) / ±0.13337 over 9 scenes)
Rank (per category): 1 (of 108)
| Scene | Features | Matches (matcher) |
Matches (filter) |
Matches (final) |
Rep. @ 3 px. | MS @ 3 px. | mAA(5o) | mAA(10o) |
| bm | 2048.0 | — | — | 362.9 | 0.457 Rank: 38/108 |
0.895 Rank: 68/108 |
0.34216 (±0.00204) Rank: 2/108 |
0.49788 (±0.00187) Rank: 2/108 |
| fcs | 2048.0 | — | — | 522.3 | 0.415 Rank: 15/108 |
0.873 Rank: 48/108 |
0.65656 (±0.00191) Rank: 2/108 |
0.77368 (±0.00095) Rank: 1/108 |
| lms | 2048.0 | — | — | 572.6 | 0.460 Rank: 3/108 |
0.679 Rank: 59/108 |
0.62403 (±0.00049) Rank: 1/108 |
0.74849 (±0.00100) Rank: 1/108 |
| lb | 2048.0 | — | — | 393.0 | 0.403 Rank: 15/108 |
0.701 Rank: 29/108 |
0.50877 (±0.00204) Rank: 2/108 |
0.62429 (±0.00252) Rank: 1/108 |
| mc | 2048.0 | — | — | 404.6 | 0.420 Rank: 23/108 |
0.860 Rank: 71/108 |
0.36080 (±0.00204) Rank: 2/108 |
0.51388 (±0.00180) Rank: 6/108 |
| mr | 2048.0 | — | — | 444.4 | 0.424 Rank: 23/108 |
0.899 Rank: 61/108 |
0.28184 (±0.00077) Rank: 3/108 |
0.39941 (±0.00182) Rank: 2/108 |
| psm | 2048.0 | — | — | 364.4 | 0.332 Rank: 21/108 |
0.612 Rank: 9/108 |
0.24717 (±0.00154) Rank: 1/108 |
0.40396 (±0.00138) Rank: 2/108 |
| sf | 2048.0 | — | — | 503.8 | 0.371 Rank: 23/108 |
0.788 Rank: 61/108 |
0.52426 (±0.00093) Rank: 1/108 |
0.66745 (±0.00096) Rank: 1/108 |
| spc | 2048.0 | — | — | 405.5 | 0.382 Rank: 26/108 |
0.797 Rank: 58/108 |
0.52098 (±0.00130) Rank: 2/108 |
0.68402 (±0.00135) Rank: 2/108 |
| avg | 2048.0 | — | — | 441.5 | 0.407 Rank: 21/108 |
0.789 Rank: 40/108 |
0.45184 (±0.00055) Rank: 1/108 |
0.59034 (±0.00050) Rank: 1/108 |
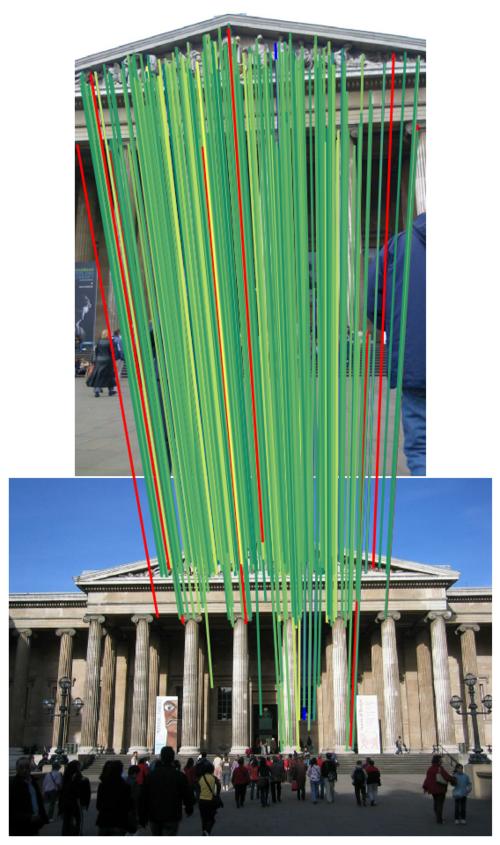
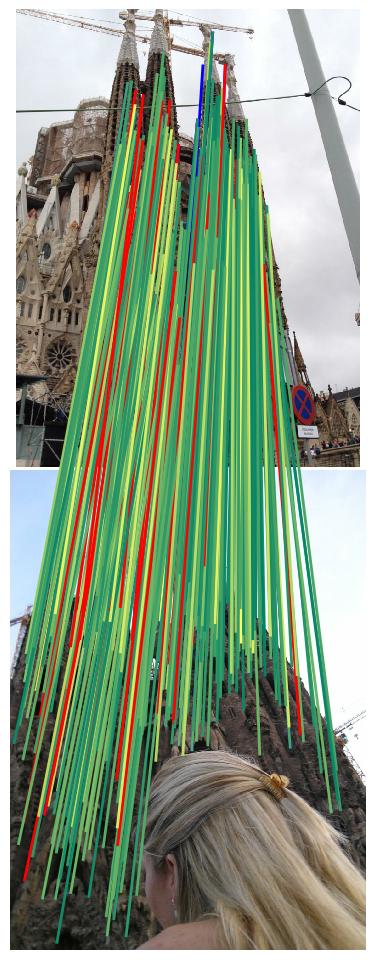
We show the inliers that survive the robust estimation loop (i.e. RANSAC), or those supplied with the submission if using custom matches, and use the depth estimates to determine whether they are correct. We draw matches above a 5-pixel error threshold in red, and those below are color-coded by their error, from 0 (green) to 5 pixels (yellow). Matches for which we do not have depth estimates are drawn in blue. Please note that the depth maps are estimates and may contain errors.
— british museum —









— florence cathedral side —










— lincoln memorial statue —










— london bridge —










— milan cathedral —










— mount rushmore —










— piazza san marco —










— sagrada familia —









— saint paul's cathedral —










Phototourism / Multiview track
mAA at 10 degrees: 0.77337 (±0.00167 over 3 run(s) / ±0.09824 over 9 scenes)
Rank (per category): 2 (of 108)
| Scene | Features | Matches (input) |
RegistrationRatio (%) | Number of Landmarks |
Track Length | ATE | mAA(50) | mAA(100) |
| bm | 2048.0 | 362.12 | 99.98 Rank: 6/108 |
1937.48 Rank: 19/108 |
4.844 Rank: 68/108 |
0.34018 Rank: 1/108 |
0.58729 (±0.00120) Rank: 2/108 |
0.73087 (±0.00027) Rank: 2/108 |
| fcs | 2048.0 | 529.35 | 97.53 Rank: 43/108 |
2587.28 Rank: 5/108 |
5.061 Rank: 9/108 |
0.25188 Rank: 21/108 |
0.74447 (±0.01479) Rank: 8/108 |
0.79734 (±0.01538) Rank: 17/108 |
| lms | 2048.0 | 599.48 | 99.27 Rank: 13/108 |
1996.74 Rank: 20/108 |
5.888 Rank: 3/108 |
0.27631 Rank: 6/108 |
0.86379 (±0.00255) Rank: 4/108 |
0.91299 (±0.00283) Rank: 5/108 |
| lb | 2048.0 | 477.78 | 98.79 Rank: 1/108 |
2040.80 Rank: 12/108 |
5.403 Rank: 11/108 |
0.48950 Rank: 20/108 |
0.72628 (±0.00276) Rank: 6/108 |
0.81830 (±0.00324) Rank: 6/108 |
| mc | 2048.0 | 397.82 | 100.00 Rank: 1/108 |
2066.08 Rank: 15/108 |
5.075 Rank: 13/108 |
0.35052 Rank: 10/108 |
0.55363 (±0.00143) Rank: 6/108 |
0.69885 (±0.00162) Rank: 6/108 |
| mr | 2048.0 | 437.29 | 94.80 Rank: 6/108 |
2190.25 Rank: 7/108 |
4.831 Rank: 10/108 |
0.51049 Rank: 7/108 |
0.44269 (±0.01059) Rank: 1/108 |
0.56403 (±0.01356) Rank: 1/108 |
| psm | 2048.0 | 361.59 | 99.03 Rank: 7/108 |
2418.40 Rank: 12/108 |
4.568 Rank: 2/108 |
0.32072 Rank: 3/108 |
0.65363 (±0.00217) Rank: 8/108 |
0.73552 (±0.00207) Rank: 9/108 |
| sf | 2048.0 | 496.26 | 99.83 Rank: 9/108 |
2765.61 Rank: 4/108 |
5.026 Rank: 6/108 |
0.27712 Rank: 1/108 |
0.77210 (±0.00423) Rank: 6/108 |
0.85580 (±0.00442) Rank: 5/108 |
| spc | 2048.0 | 415.25 | 100.00 Rank: 1/108 |
2206.26 Rank: 12/108 |
5.134 Rank: 9/108 |
0.40916 Rank: 1/108 |
0.75385 (±0.00343) Rank: 2/108 |
0.84662 (±0.00322) Rank: 2/108 |
| avg | 2048.0 | 452.99 | 98.80 Rank: 4/108 |
2245.43 Rank: 10/108 |
5.092 Rank: 9/108 |
0.35843 Rank: 2/108 |
0.67753 (±0.00171) Rank: 2/108 |
0.77337 (±0.00167) Rank: 2/108 |
In the multi-view track we reconstruct the scene with Structure-from-Motion (Colmap) with small sets of images. We show the results for one bag of 25 images (displaying: 10). Keypoints are drawn in blue if they are part of the model, and in red otherwise.
— british museum —










— florence cathedral side —










— lincoln memorial statue —










— london bridge —










— milan cathedral —










— mount rushmore —










— piazza san marco —










— sagrada familia —










— saint paul's cathedral —









