Submission ID: 00607
HarrisZ (more kpt) + DeepOrientation + SOSNet + Blob Matching + DTM + RANSAC 0.75
Processed: 20-06-03. Download link: sid-00607-harrisz_more_kpt_sosnet_blob_dtm_ransac_0.75.json
This page ranks the submission against all others using the same number of keypoints, regardless of descriptor size. Please hover over table headers for descriptions on metrics and full scene names.
Metadata
- Authors: Fabio Bellavia (contact)
- Keypoint: hz
- Descriptor: deep-oriented-sosnet (128 float32: 512 bytes)
- Number of features: 8000
- Summary: HarrisZ (start scale 2) [Bellavia et al. 2011] + Deep patch orientation [Yi et al. 2015] + SOSNet [Tian at al. 2019] (weights: sosnet-32x32-hpatches_a.pth) + Blob Matching [unpublished] + Delaunay Triangulation Matching (DTM) [unpublished] + PyRANSAC (threshold 0.75, degeneracy check true, confidence 0.98, max iter 500000) [Mishkin 2019]
- Paper: N/A
- Website: N/A
- Origin: Submission
- Flags: is_submission, is_challenge_2020
Phototourism / Stereo track
mAA at 10 degrees: 0.40725 (±0.00000 over 3 run(s) / ±0.14923 over 9 scenes)
Rank (per category): 117 (of 147)
| Scene | Features | Matches (matcher) |
Matches (filter) |
Matches (final) |
Rep. @ 3 px. | MS @ 3 px. | mAA(5o) | mAA(10o) |
| bm | 3076.0 | — | — | 548.8 | 0.546 Rank: 25/147 |
0.783 Rank: 132/147 |
0.12410 (±0.00000) Rank: 120/147 |
0.20594 (±0.00000) Rank: 121/147 |
| fcs | 4792.7 | — | — | 773.5 | 0.435 Rank: 128/147 |
0.796 Rank: 128/147 |
0.47514 (±0.00000) Rank: 120/147 |
0.61741 (±0.00000) Rank: 118/147 |
| lms | 2409.0 | — | — | 664.7 | 0.431 Rank: 128/147 |
0.618 Rank: 131/147 |
0.45671 (±0.00000) Rank: 110/147 |
0.58441 (±0.00000) Rank: 100/147 |
| lb | 3671.9 | — | — | 468.9 | 0.386 Rank: 134/147 |
0.613 Rank: 130/147 |
0.30062 (±0.00000) Rank: 120/147 |
0.41037 (±0.00000) Rank: 114/147 |
| mc | 5041.2 | — | — | 842.9 | 0.516 Rank: 130/147 |
0.818 Rank: 131/147 |
0.24882 (±0.00000) Rank: 120/147 |
0.38254 (±0.00000) Rank: 123/147 |
| mr | 5418.4 | — | — | 903.9 | 0.466 Rank: 79/147 |
0.810 Rank: 132/147 |
0.18655 (±0.00000) Rank: 126/147 |
0.27913 (±0.00000) Rank: 125/147 |
| psm | 4909.8 | — | — | 462.9 | 0.391 Rank: 79/147 |
0.393 Rank: 128/147 |
0.10532 (±0.00000) Rank: 120/147 |
0.20060 (±0.00000) Rank: 114/147 |
| sf | 6853.2 | — | — | 1465.6 | 0.475 Rank: 127/147 |
0.770 Rank: 125/147 |
0.41558 (±0.00000) Rank: 118/147 |
0.56349 (±0.00000) Rank: 114/147 |
| spc | 4138.4 | — | — | 583.0 | 0.445 Rank: 131/147 |
0.691 Rank: 129/147 |
0.27985 (±0.00000) Rank: 124/147 |
0.42132 (±0.00000) Rank: 124/147 |
| avg | 4478.9 | — | — | 746.0 | 0.455 Rank: 128/147 |
0.699 Rank: 129/147 |
0.28808 (±0.00000) Rank: 117/147 |
0.40725 (±0.00000) Rank: 117/147 |
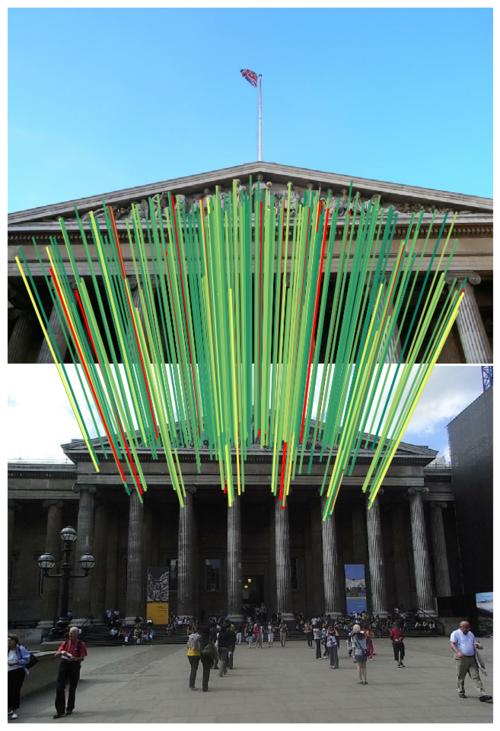
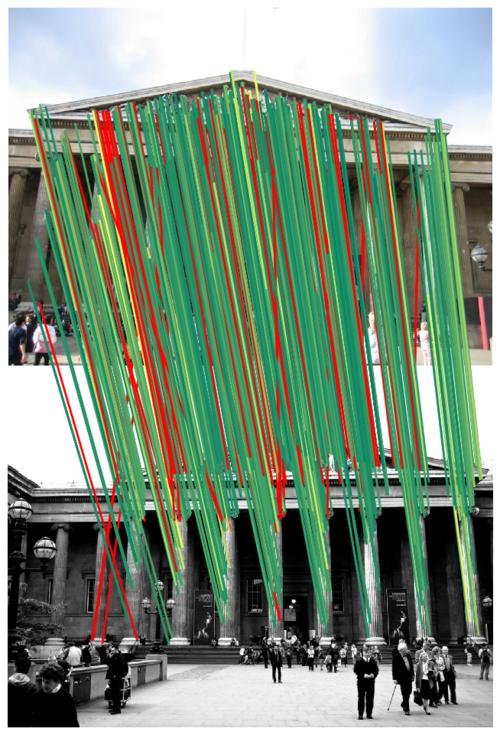
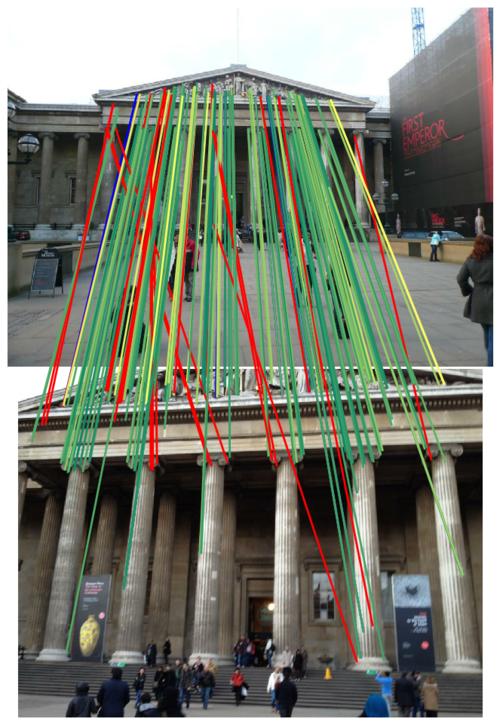
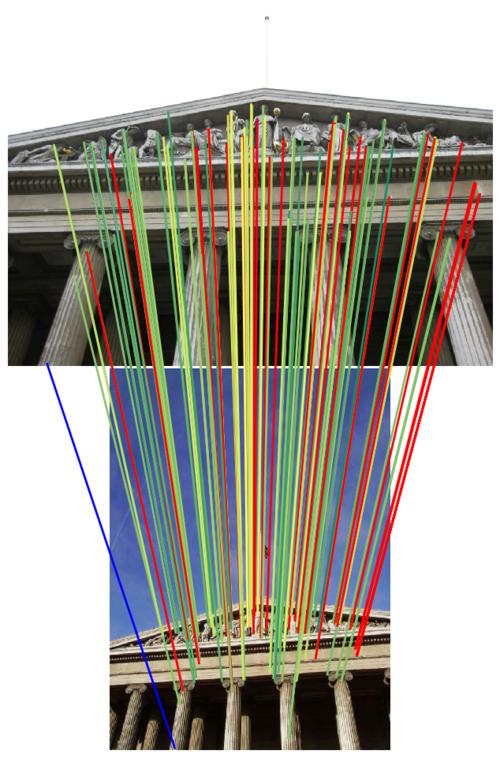
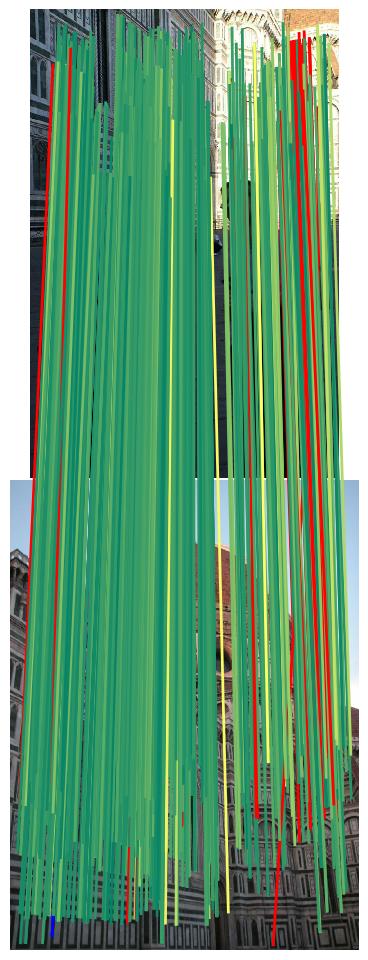
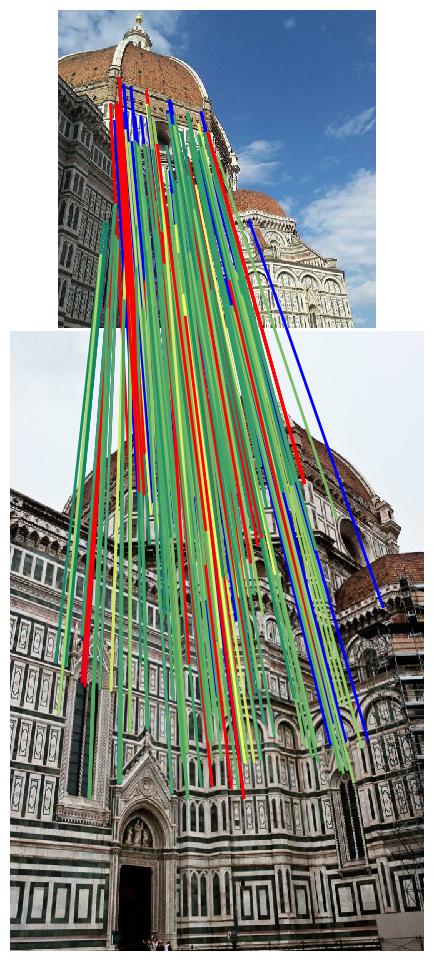
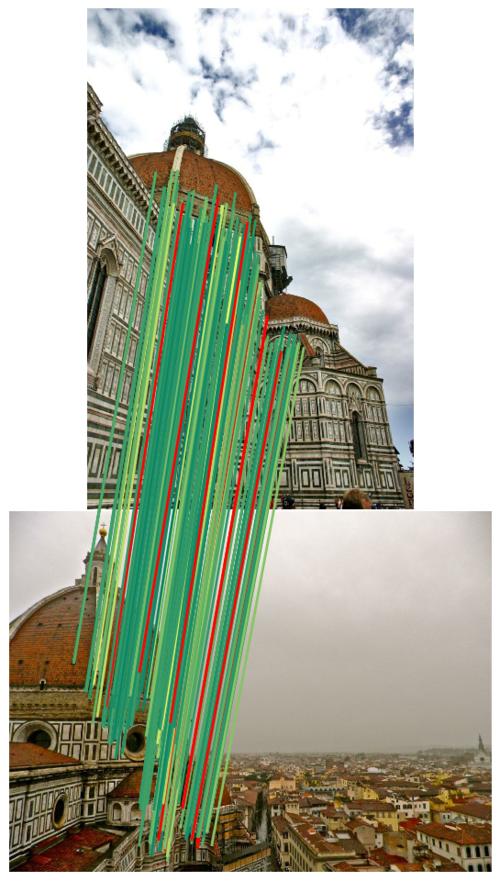
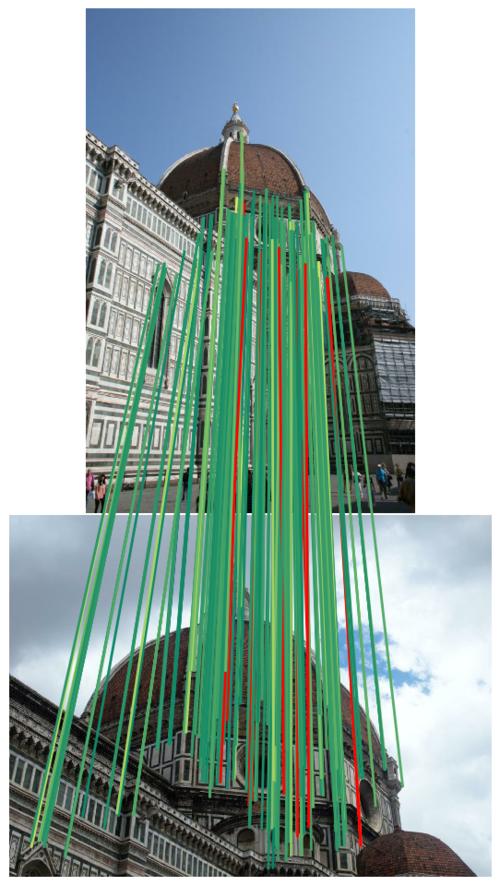
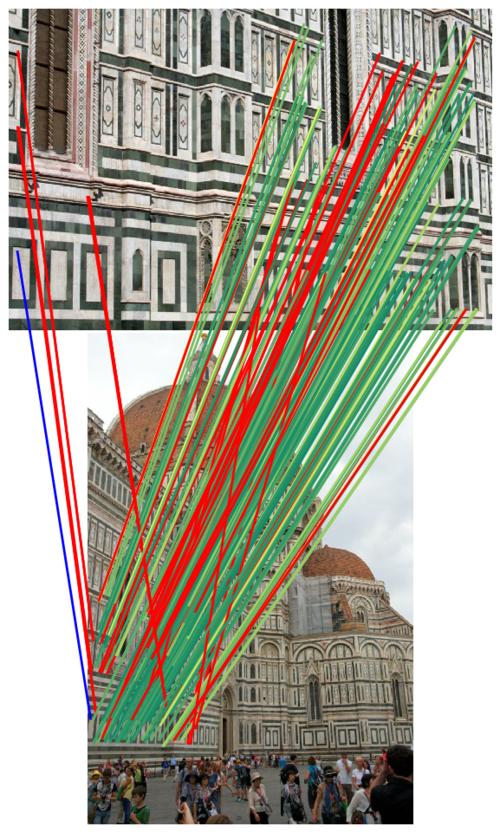
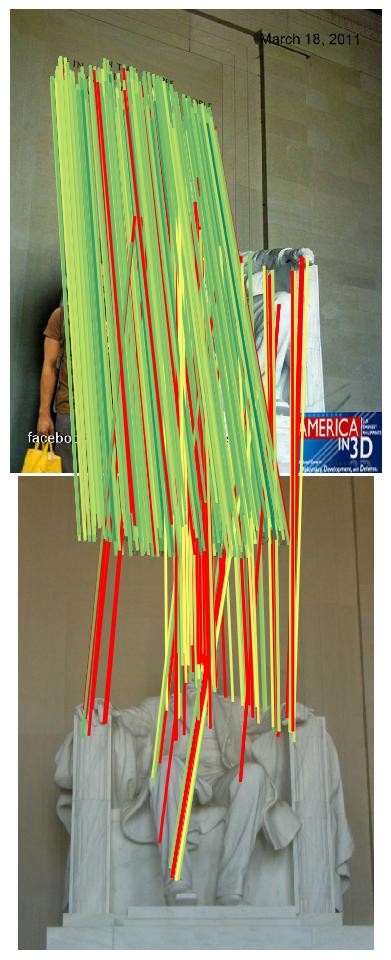
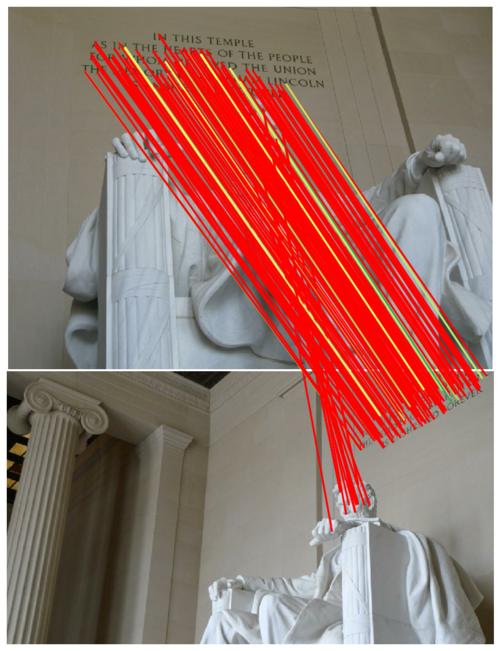
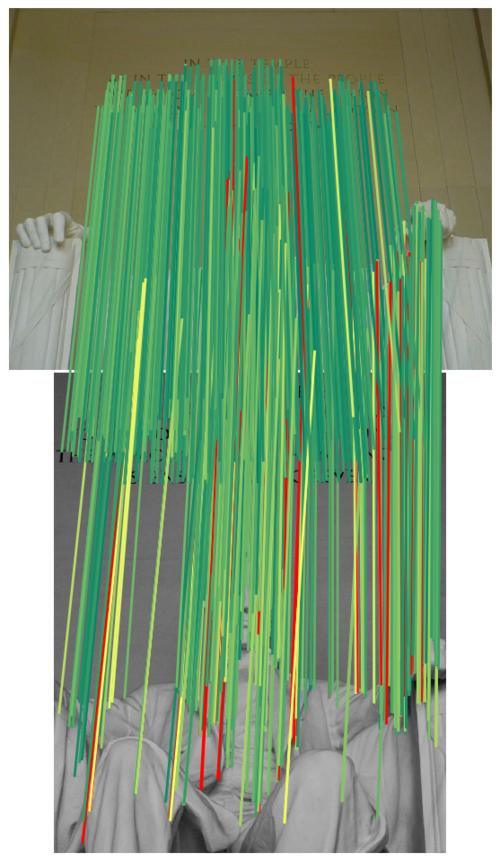
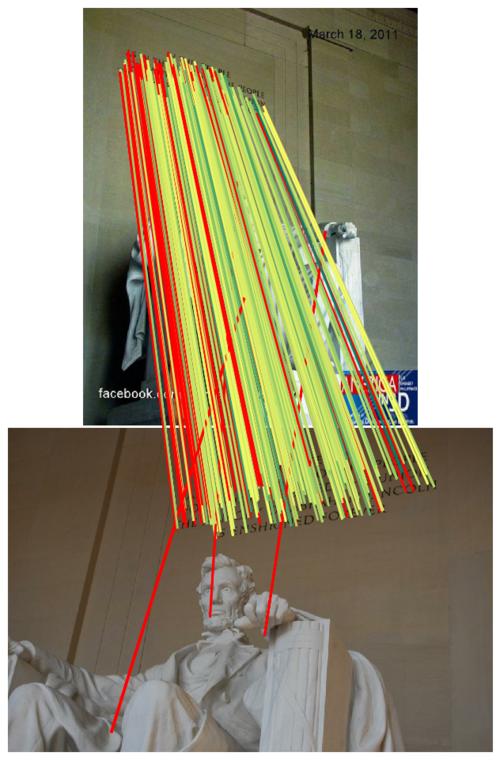
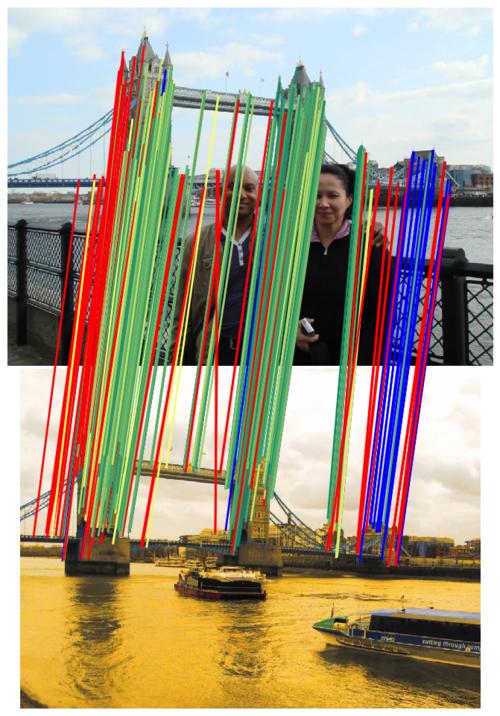
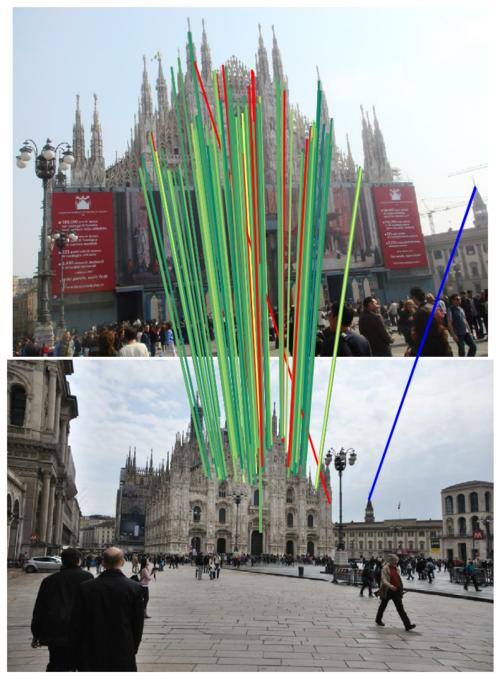
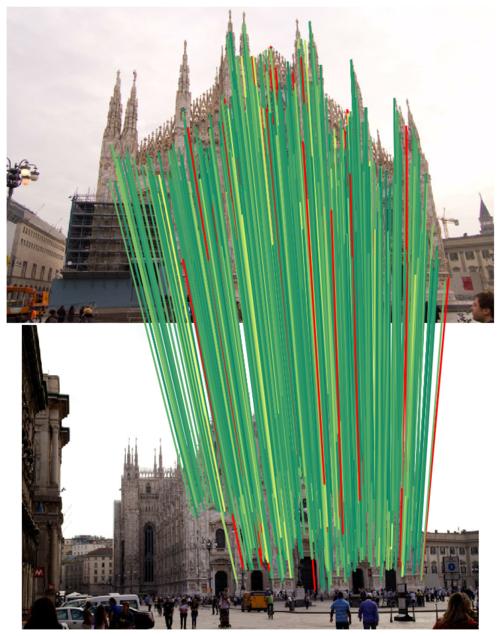
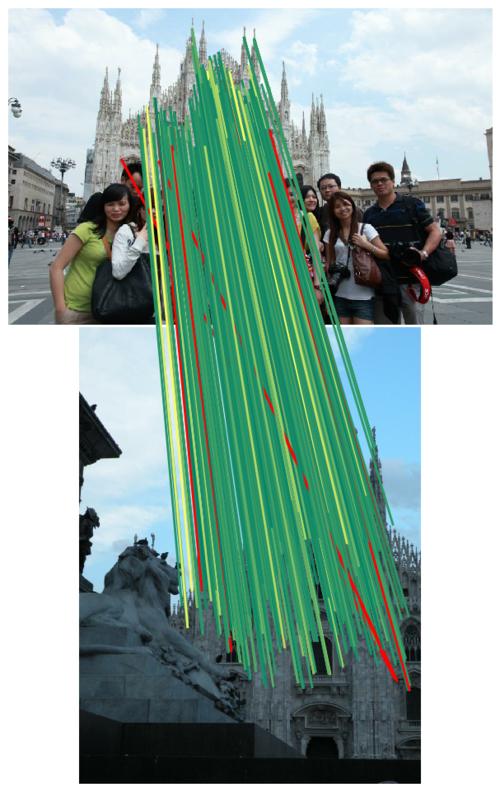
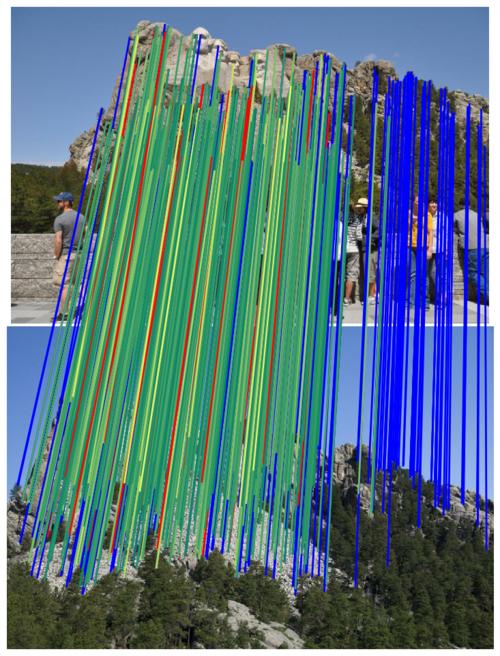
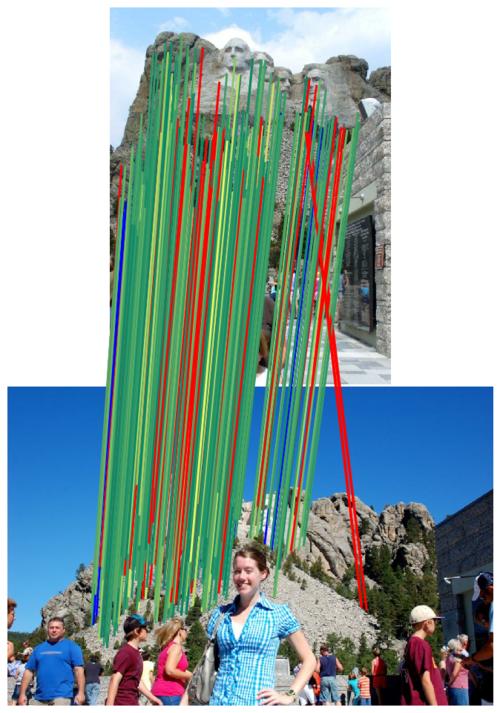
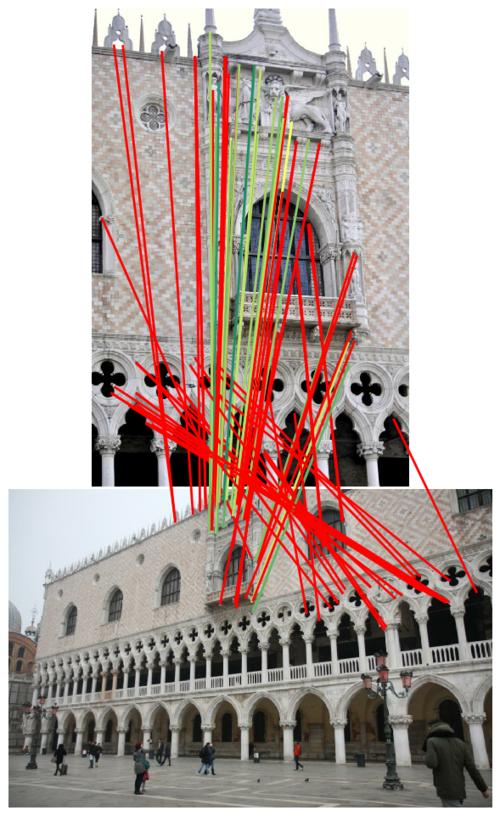
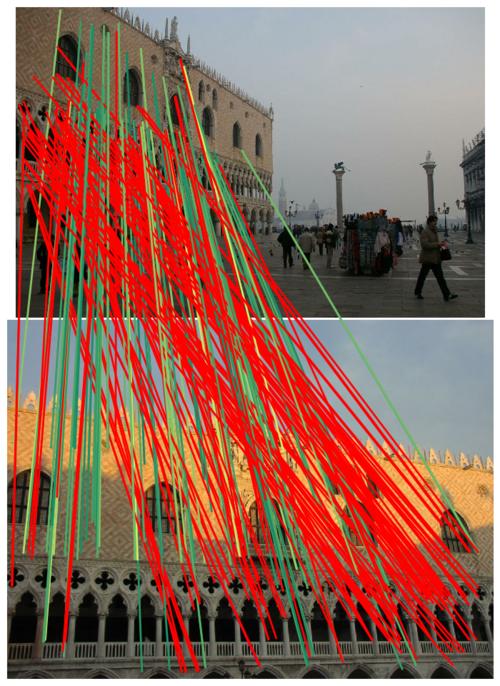
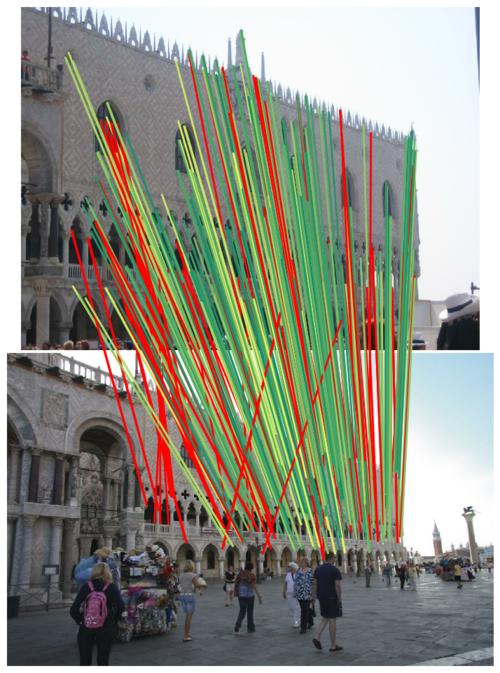
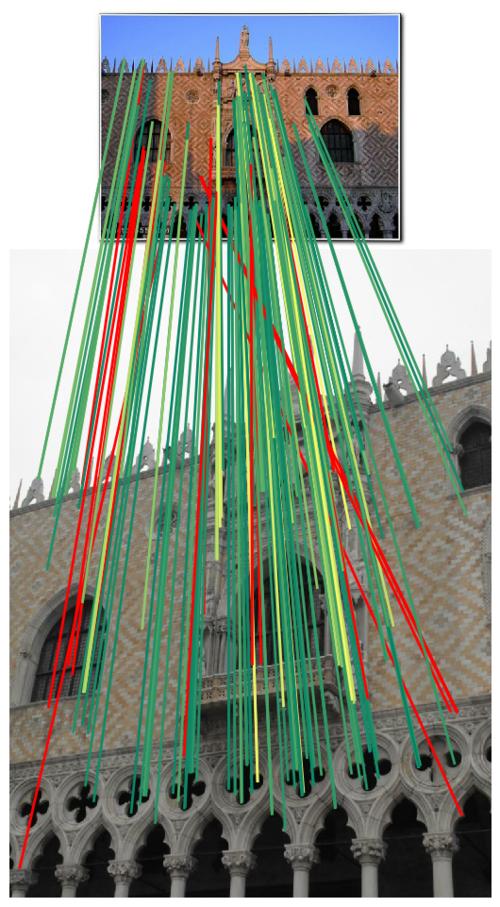
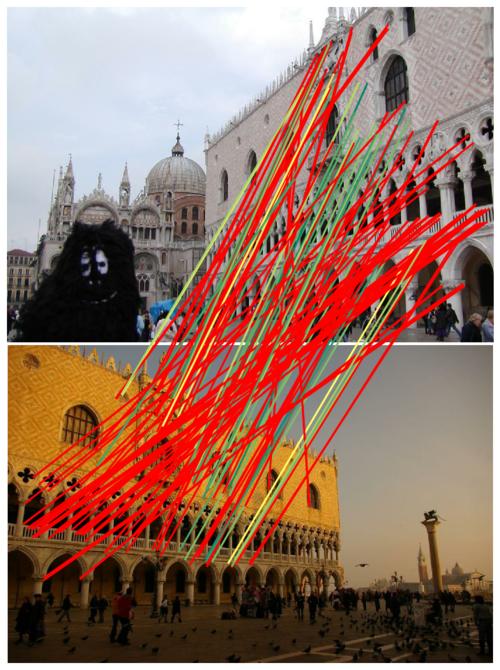
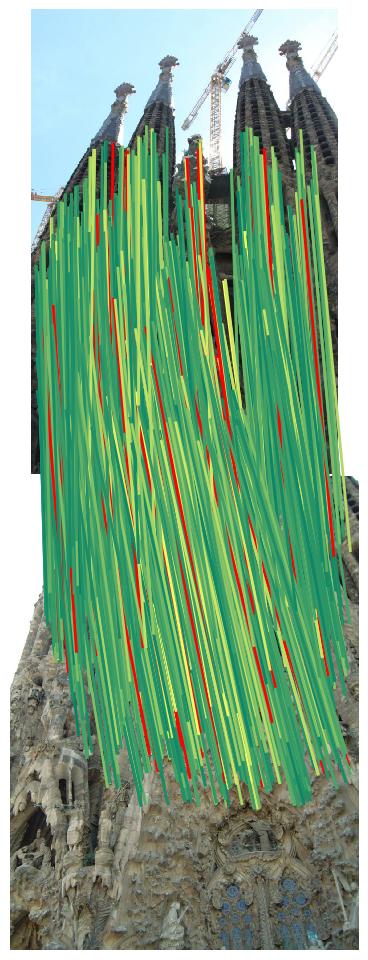
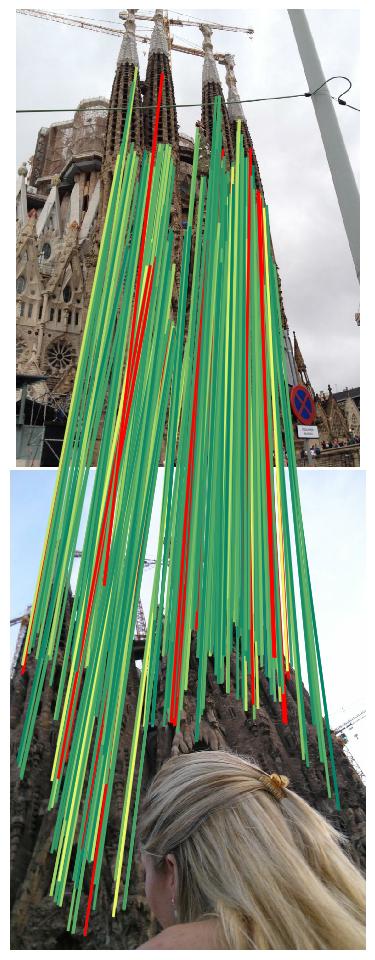
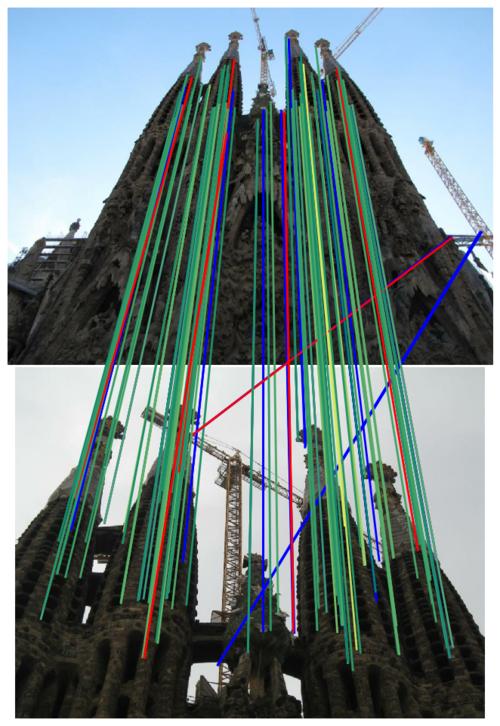
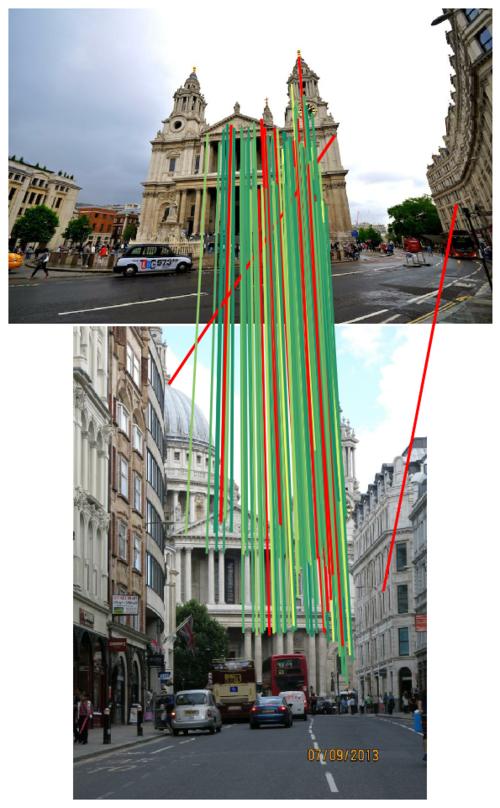
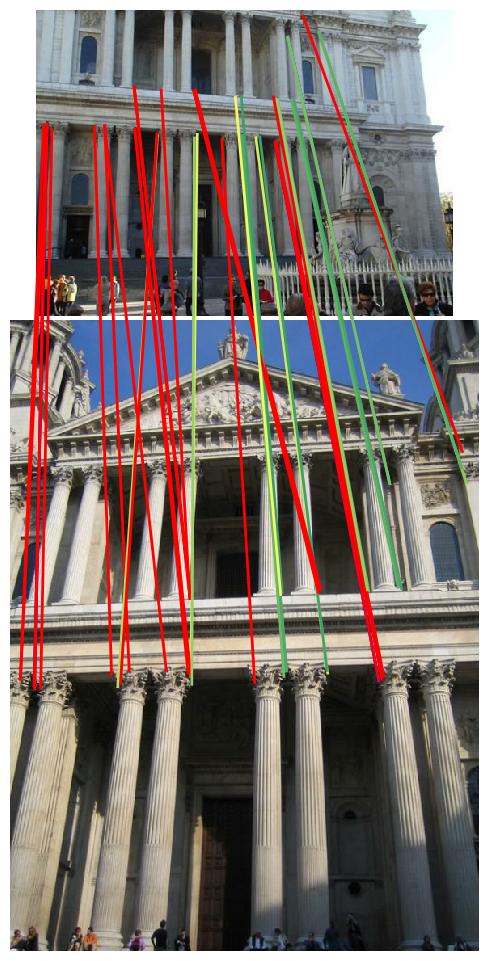
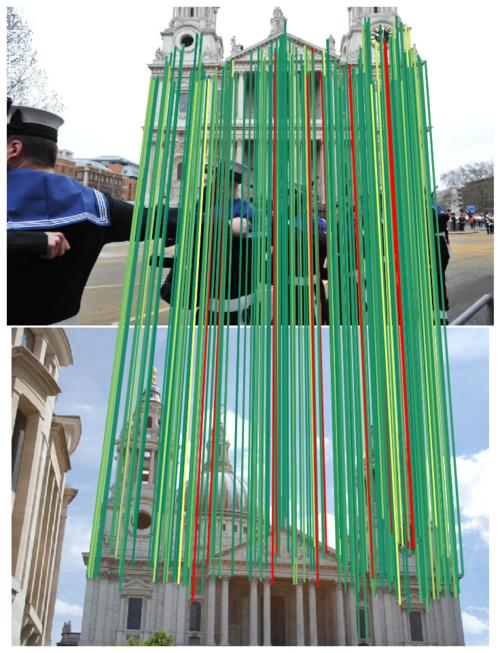
We show the inliers that survive the robust estimation loop (i.e. RANSAC), or those supplied with the submission if using custom matches, and use the depth estimates to determine whether they are correct. We draw matches above a 5-pixel error threshold in red, and those below are color-coded by their error, from 0 (green) to 5 pixels (yellow). Matches for which we do not have depth estimates are drawn in blue. Please note that the depth maps are estimates and may contain errors.
— british museum —






— florence cathedral side —





— lincoln memorial statue —






— london bridge —









— milan cathedral —







— mount rushmore —








— piazza san marco —





— sagrada familia —







— saint paul's cathedral —







Phototourism / Multiview track
mAA at 10 degrees: 0.69399 (±0.00179 over 3 run(s) / ±0.15099 over 9 scenes)
Rank (per category): 69 (of 147)
| Scene | Features | Matches (input) |
RegistrationRatio (%) | Number of Landmarks |
Track Length | ATE | mAA(50) | mAA(100) |
| bm | 3076.0 | 546.68 | 99.37 Rank: 126/147 |
1482.62 Rank: 135/147 |
4.824 Rank: 107/147 |
0.60820 Rank: 116/147 |
0.37184 (±0.00385) Rank: 102/147 |
0.50863 (±0.00370) Rank: 109/147 |
| fcs | 4792.7 | 803.73 | 98.84 Rank: 20/147 |
3390.22 Rank: 128/147 |
4.276 Rank: 106/147 |
0.24770 Rank: 46/147 |
0.74002 (±0.01160) Rank: 31/147 |
0.80452 (±0.01250) Rank: 32/147 |
| lms | 2409.0 | 714.44 | 99.07 Rank: 69/147 |
1893.76 Rank: 134/147 |
4.997 Rank: 4/147 |
0.27975 Rank: 48/147 |
0.79999 (±0.00664) Rank: 93/147 |
0.86775 (±0.00826) Rank: 88/147 |
| lb | 3671.9 | 578.92 | 98.70 Rank: 10/147 |
2006.38 Rank: 132/147 |
4.475 Rank: 102/147 |
0.46668 Rank: 10/147 |
0.67960 (±0.00089) Rank: 46/147 |
0.77969 (±0.00174) Rank: 39/147 |
| mc | 5041.2 | 825.04 | 99.96 Rank: 11/147 |
2867.51 Rank: 126/147 |
4.729 Rank: 59/147 |
0.37154 Rank: 27/147 |
0.52871 (±0.00352) Rank: 32/147 |
0.67794 (±0.00406) Rank: 25/147 |
| mr | 5418.4 | 902.51 | 94.08 Rank: 79/147 |
3308.10 Rank: 126/147 |
4.250 Rank: 61/147 |
0.54511 Rank: 115/147 |
0.42568 (±0.00887) Rank: 79/147 |
0.54338 (±0.01147) Rank: 77/147 |
| psm | 4909.8 | 451.62 | 94.57 Rank: 44/147 |
3673.75 Rank: 54/147 |
3.070 Rank: 105/147 |
0.64427 Rank: 44/147 |
0.33828 (±0.00278) Rank: 100/147 |
0.43440 (±0.00352) Rank: 91/147 |
| sf | 6853.2 | 1446.74 | 99.52 Rank: 8/147 |
5410.19 Rank: 96/147 |
4.629 Rank: 33/147 |
0.30589 Rank: 23/147 |
0.75716 (±0.00458) Rank: 10/147 |
0.84262 (±0.00545) Rank: 10/147 |
| spc | 4138.4 | 601.24 | 99.89 Rank: 15/147 |
2547.65 Rank: 132/147 |
4.476 Rank: 31/147 |
0.50440 Rank: 90/147 |
0.67711 (±0.00130) Rank: 74/147 |
0.78700 (±0.00093) Rank: 70/147 |
| avg | 4478.9 | 763.44 | 98.22 Rank: 29/147 |
2953.35 Rank: 126/147 |
4.414 Rank: 57/147 |
0.44151 Rank: 77/147 |
0.59093 (±0.00142) Rank: 72/147 |
0.69399 (±0.00179) Rank: 69/147 |
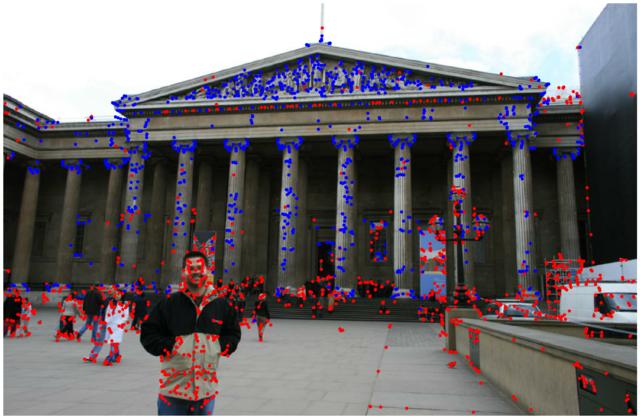
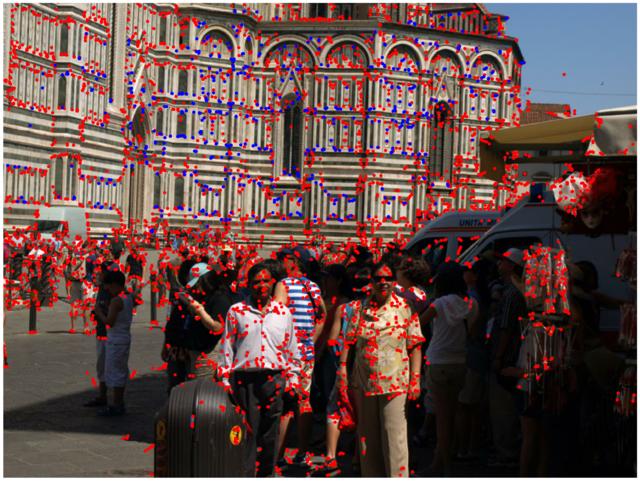
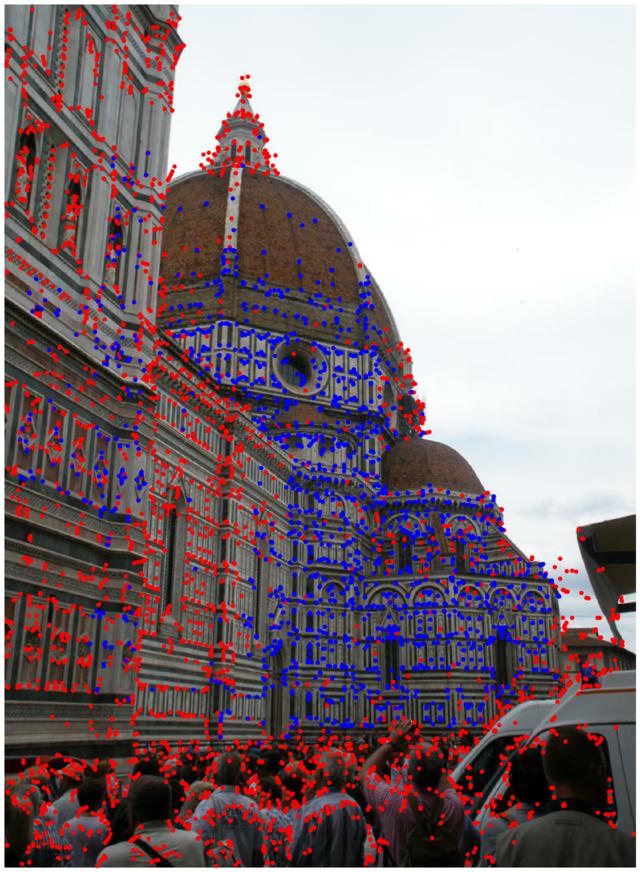
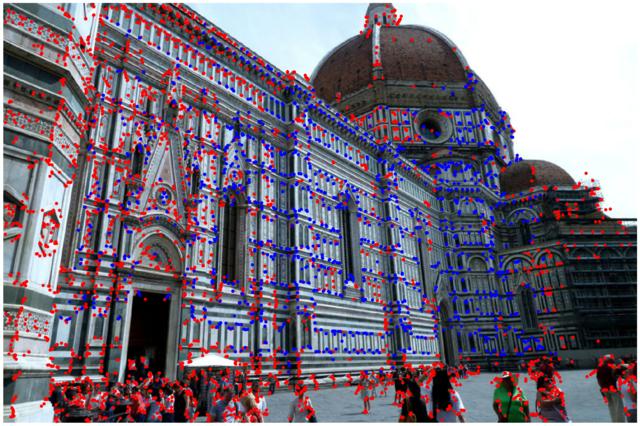
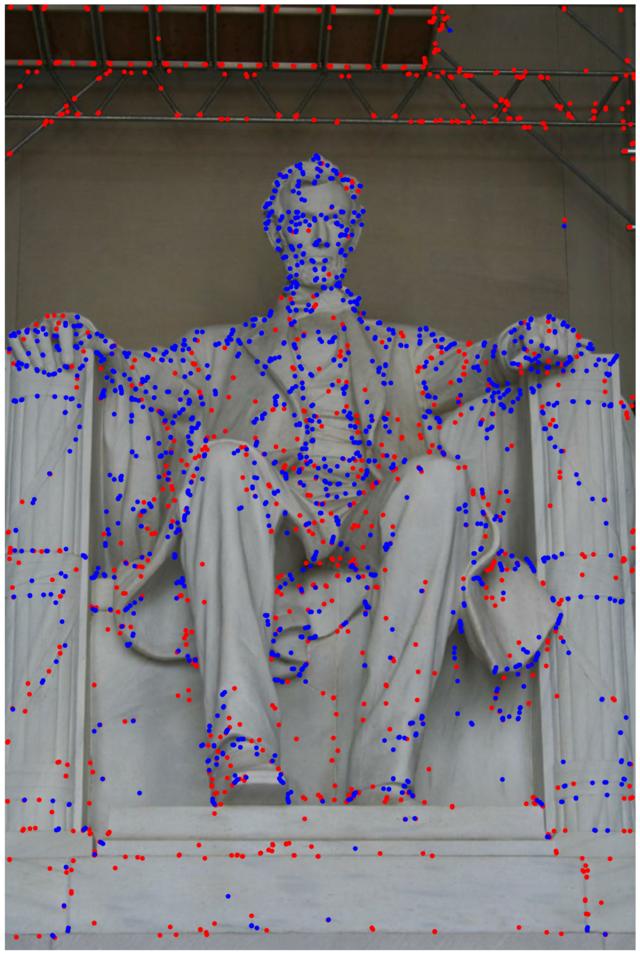
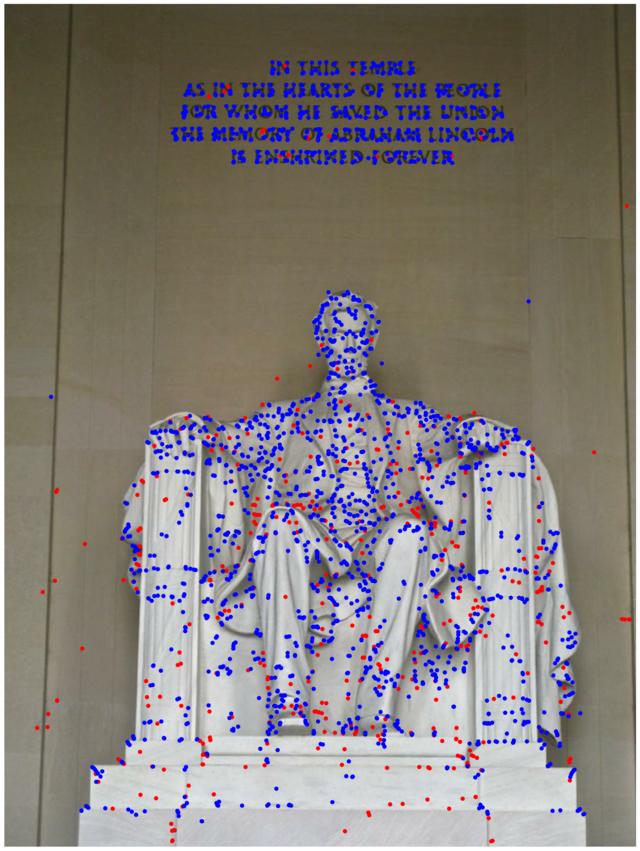
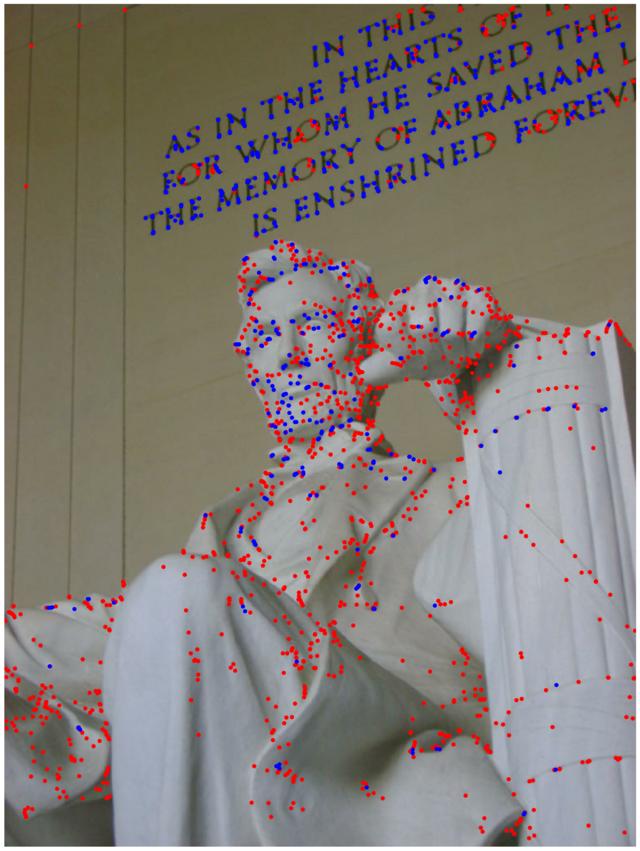
In the multi-view track we reconstruct the scene with Structure-from-Motion (Colmap) with small sets of images. We show the results for one bag of 25 images (displaying: 10). Keypoints are drawn in blue if they are part of the model, and in red otherwise.
— british museum —









— florence cathedral side —







— lincoln memorial statue —






— london bridge —









— milan cathedral —









— mount rushmore —








— piazza san marco —





— sagrada familia —









— saint paul's cathedral —