Submission ID: 00511
r2d2-wasfi
Processed: 20-04-25. Download link: sid-00511-r2d2_8k_r2d2-wasfi-epoch25-pretrained-n16-8k-degensac-th-0.5-rt-0.95.json
This page ranks the submission against all others using the same number of keypoints, regardless of descriptor size. Please hover over table headers for descriptions on metrics and full scene names.
Metadata
- Authors: Chen Shen (contact)
- Keypoint: r2d2
- Descriptor: r2d2-wasfi-epoch25-pretrained-n16-8k (128 float32: 512 bytes)
- Number of features: 8000
- Summary: r2d2 with 8k features, using the built-in matcher (bidirectional filter with the both strategy, optimal inlier and ratio test thresholds) with DEGENSAC, and setting keypoint orientation to a constant value to increase performance.
- Paper: N/A
- Website: N/A
- Origin: Submission
- Flags: is_submission, is_challenge_2020
Phototourism / Stereo track
mAA at 10 degrees: 0.37893 (±0.00023 over 3 run(s) / ±0.13042 over 9 scenes)
Rank (per category): 125 (of 147)
| Scene | Features | Matches (matcher) |
Matches (filter) |
Matches (final) |
Rep. @ 3 px. | MS @ 3 px. | mAA(5o) | mAA(10o) |
| bm | 7965.5 | 464.1 | 464.1 | 315.9 | 0.558 Rank: 23/147 |
0.891 Rank: 117/147 |
0.17343 (±0.00070) Rank: 93/147 |
0.27225 (±0.00132) Rank: 99/147 |
| fcs | 7865.4 | 422.4 | 422.4 | 286.3 | 0.490 Rank: 13/147 |
0.849 Rank: 123/147 |
0.46030 (±0.00270) Rank: 124/147 |
0.59727 (±0.00179) Rank: 125/147 |
| lms | 7789.9 | 385.2 | 385.2 | 265.3 | 0.423 Rank: 130/147 |
0.678 Rank: 89/147 |
0.46279 (±0.00169) Rank: 107/147 |
0.57670 (±0.00125) Rank: 105/147 |
| lb | 7966.2 | 258.7 | 258.7 | 166.7 | 0.431 Rank: 131/147 |
0.695 Rank: 118/147 |
0.27469 (±0.00070) Rank: 93/147 |
0.37643 (±0.00031) Rank: 125/147 |
| mc | 7824.2 | 440.5 | 440.5 | 303.2 | 0.601 Rank: 10/147 |
0.887 Rank: 121/147 |
0.20270 (±0.00070) Rank: 93/147 |
0.34170 (±0.00158) Rank: 126/147 |
| mr | 7807.5 | 589.5 | 589.5 | 435.8 | 0.581 Rank: 9/147 |
0.927 Rank: 115/147 |
0.20669 (±0.00024) Rank: 121/147 |
0.29935 (±0.00214) Rank: 121/147 |
| psm | 7782.9 | 263.1 | 263.1 | 169.2 | 0.409 Rank: 18/147 |
0.467 Rank: 121/147 |
0.08241 (±0.00084) Rank: 127/147 |
0.16259 (±0.00039) Rank: 127/147 |
| sf | 7870.6 | 479.3 | 479.3 | 330.9 | 0.534 Rank: 13/147 |
0.722 Rank: 131/147 |
0.27472 (±0.00204) Rank: 131/147 |
0.39688 (±0.00303) Rank: 130/147 |
| spc | 7877.1 | 333.1 | 333.1 | 215.7 | 0.498 Rank: 80/147 |
0.740 Rank: 127/147 |
0.24721 (±0.00263) Rank: 126/147 |
0.38721 (±0.00157) Rank: 126/147 |
| avg | 7861.0 | 404.0 | 404.0 | 276.6 | 0.503 Rank: 17/147 |
0.762 Rank: 123/147 |
0.26499 (±0.00046) Rank: 125/147 |
0.37893 (±0.00023) Rank: 125/147 |
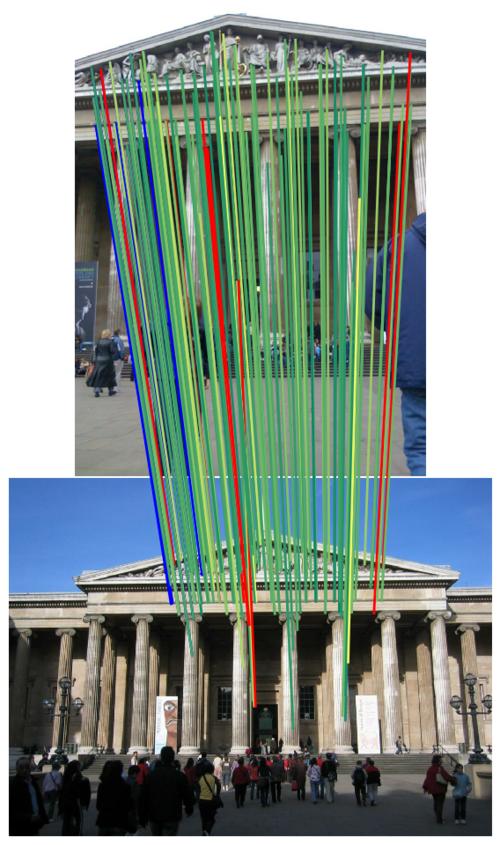
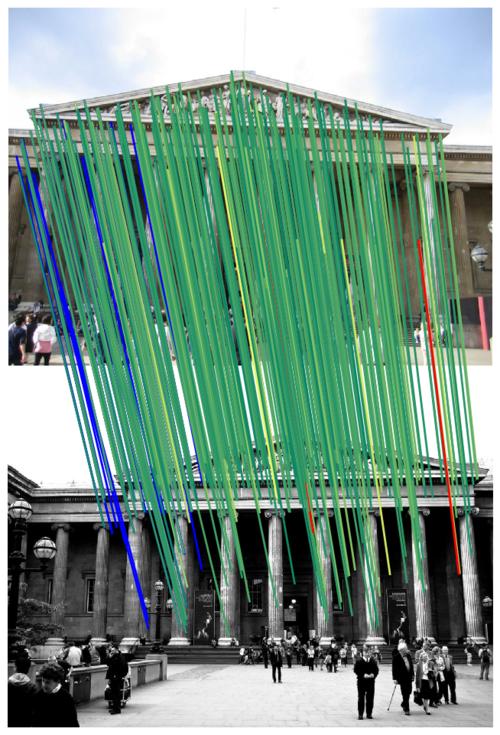
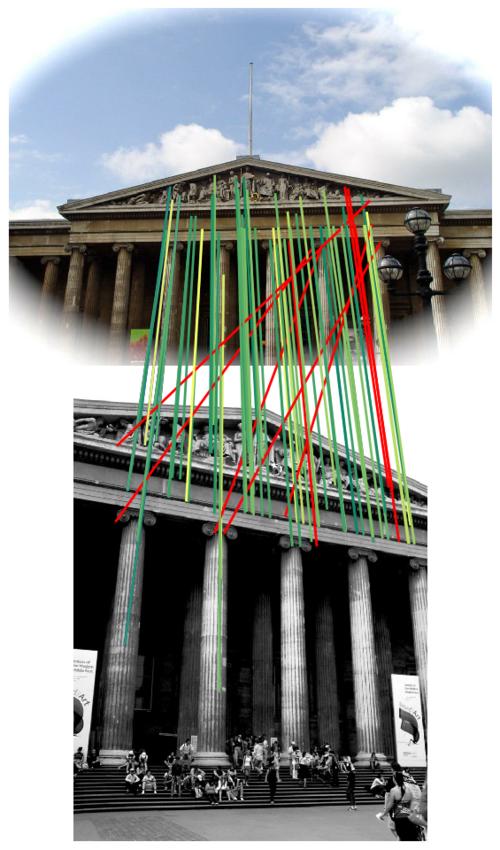
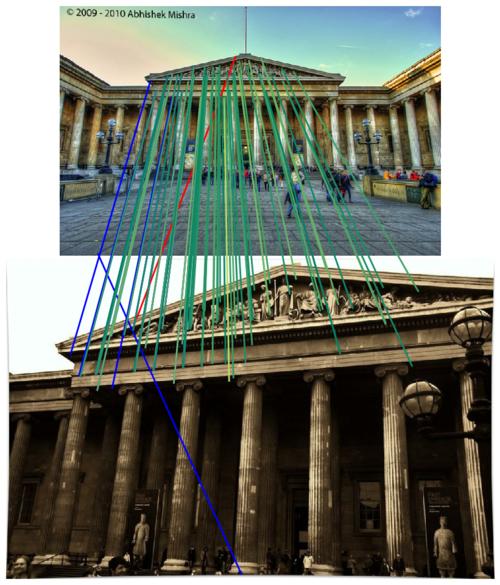
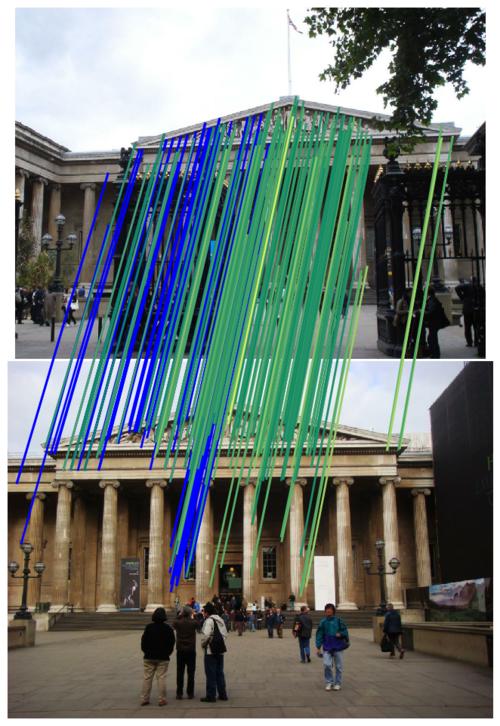
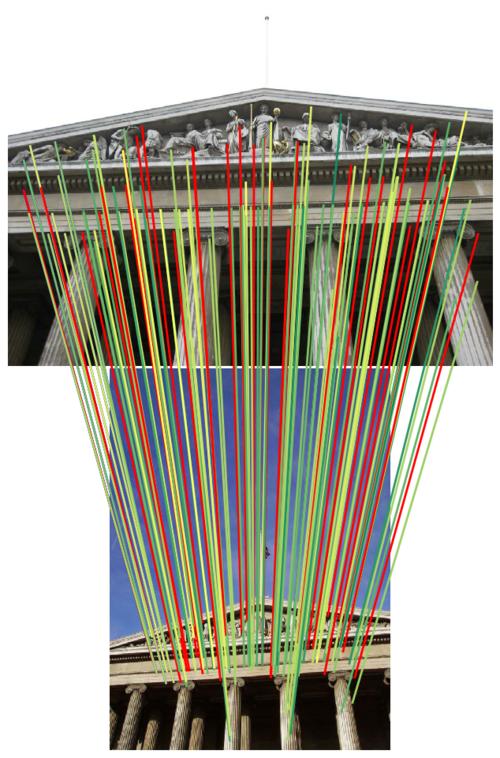
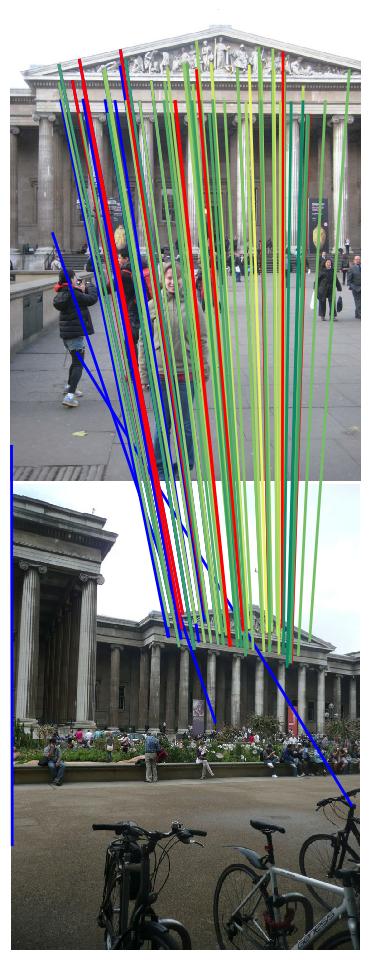
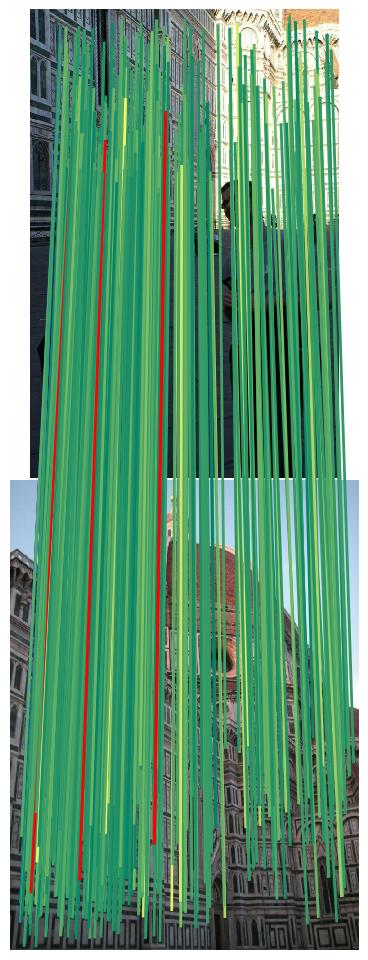
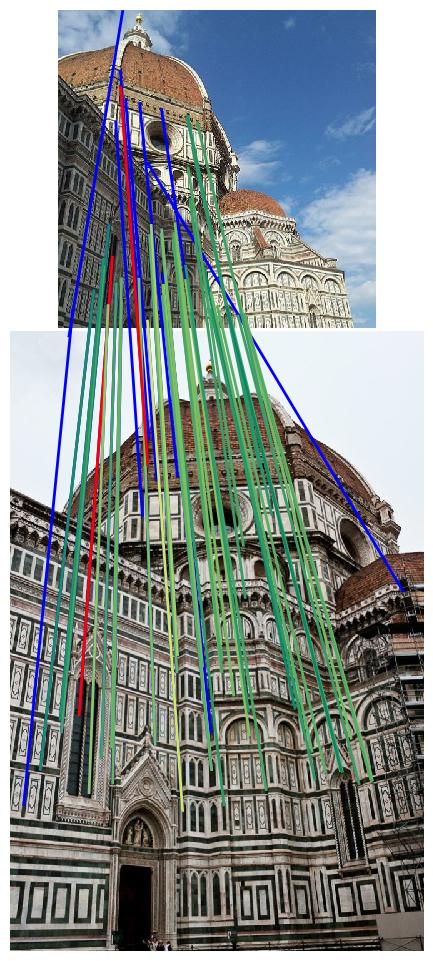
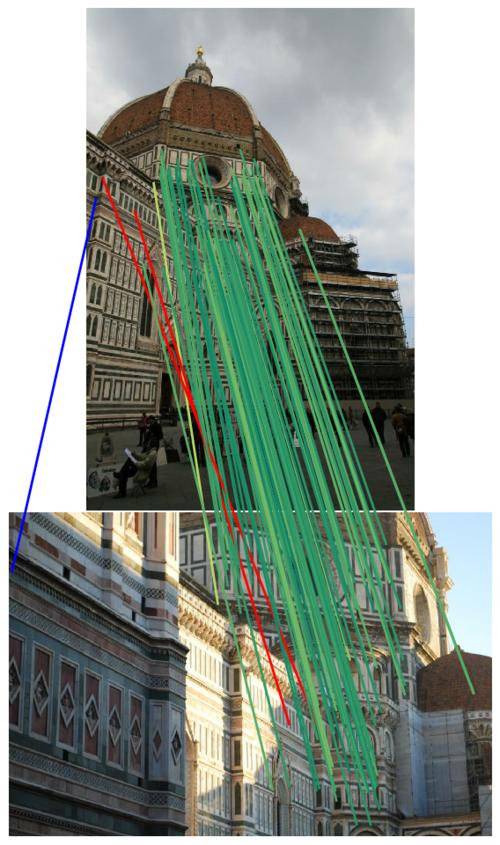
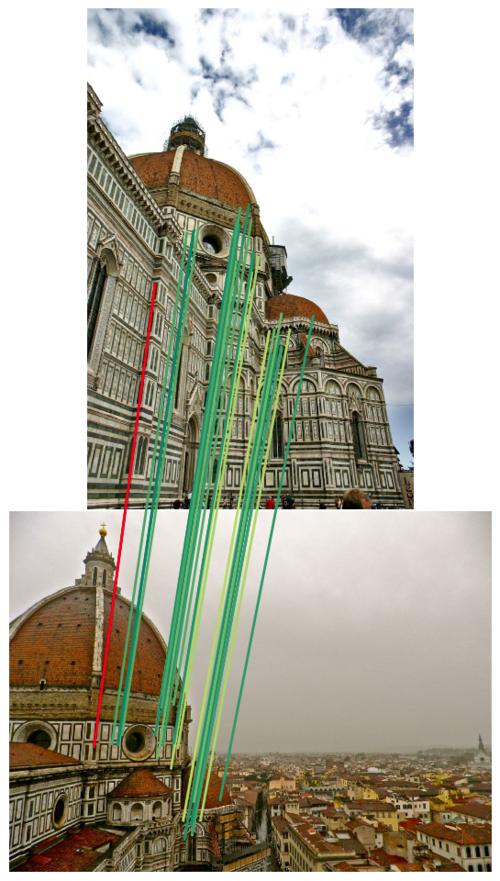
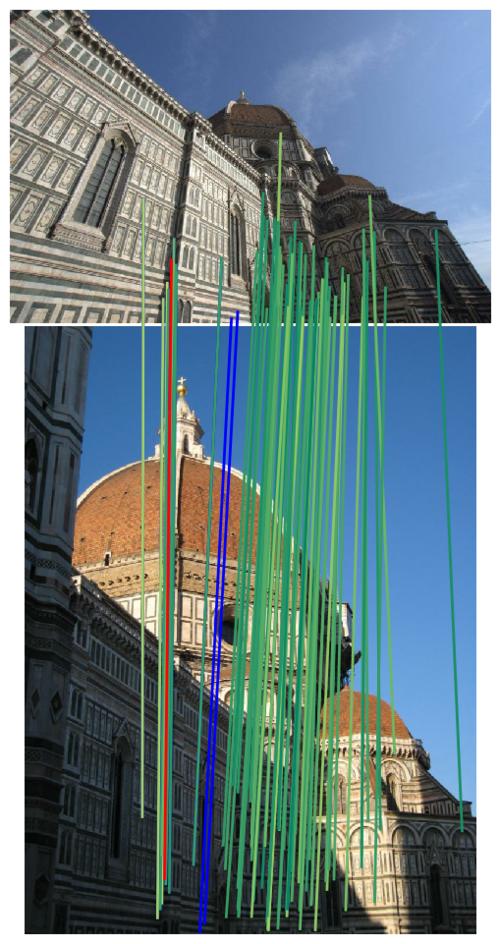
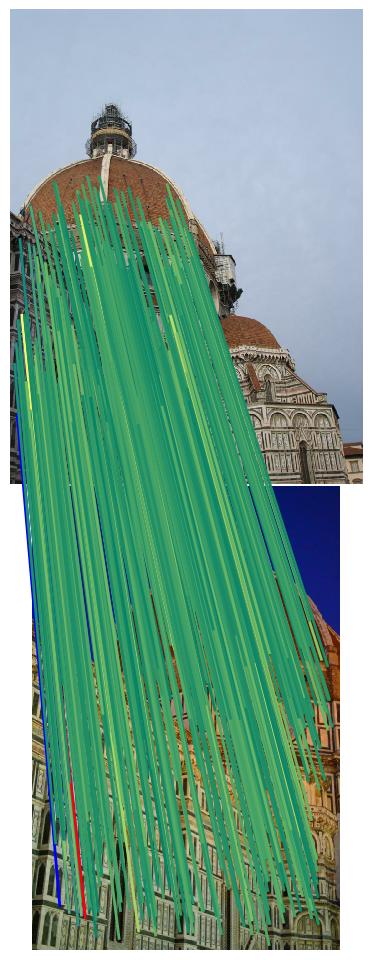
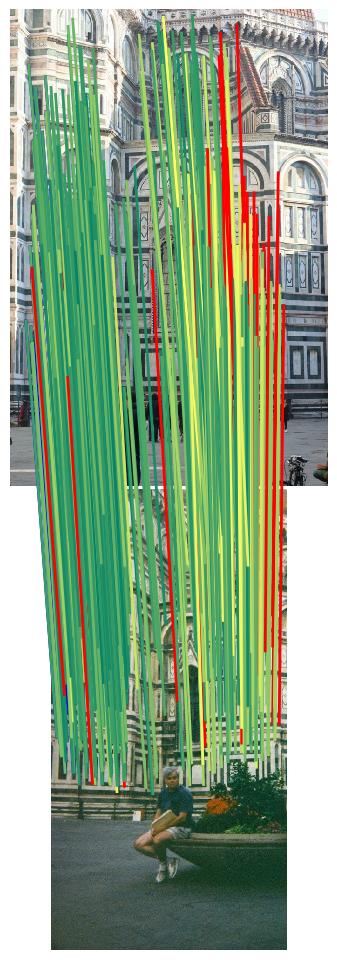
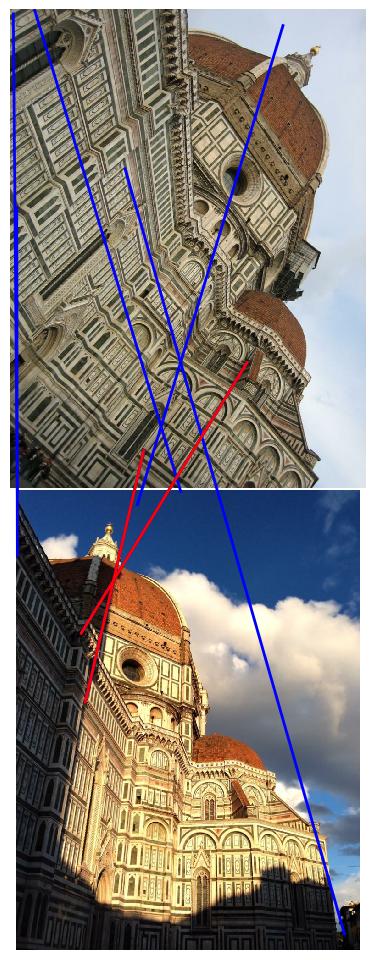
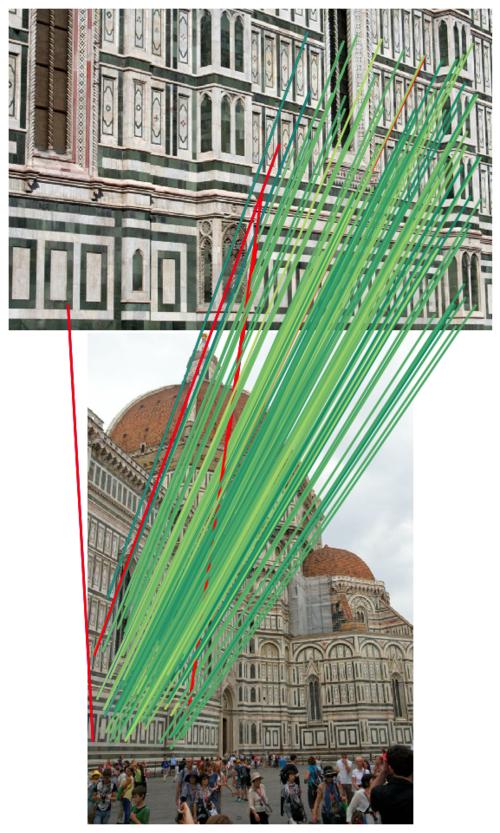
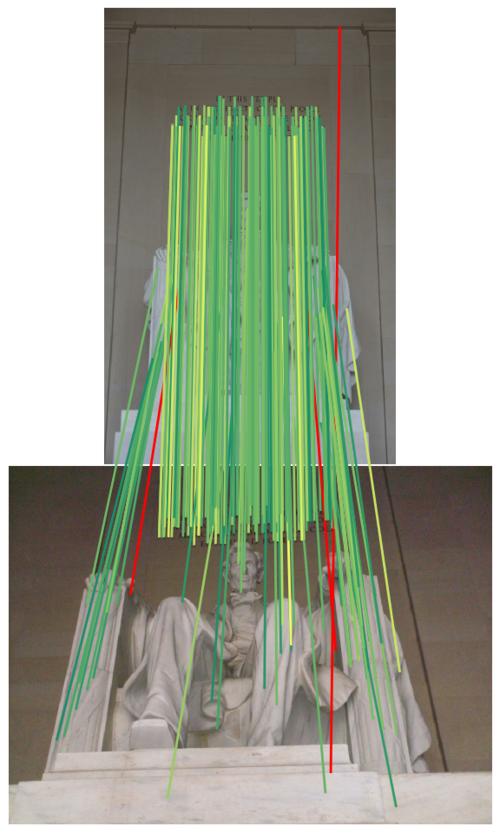
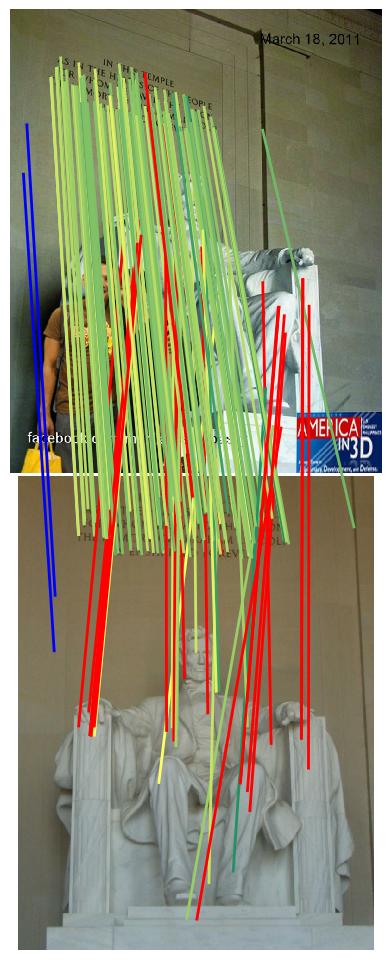
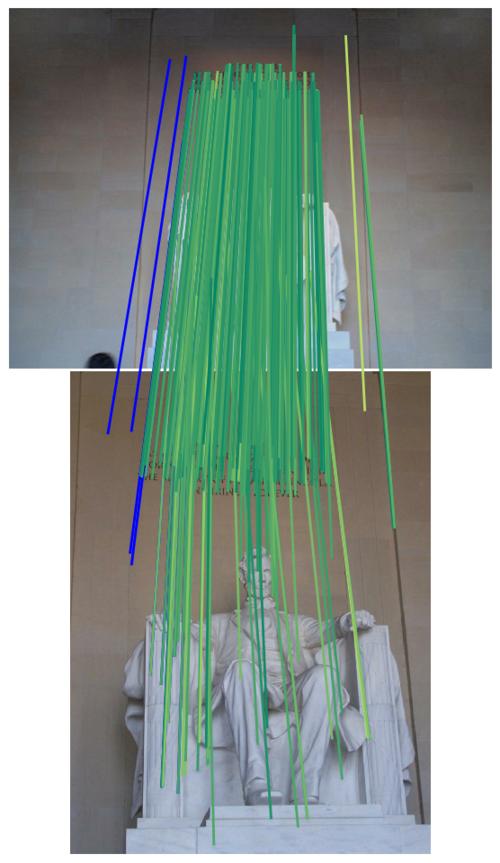
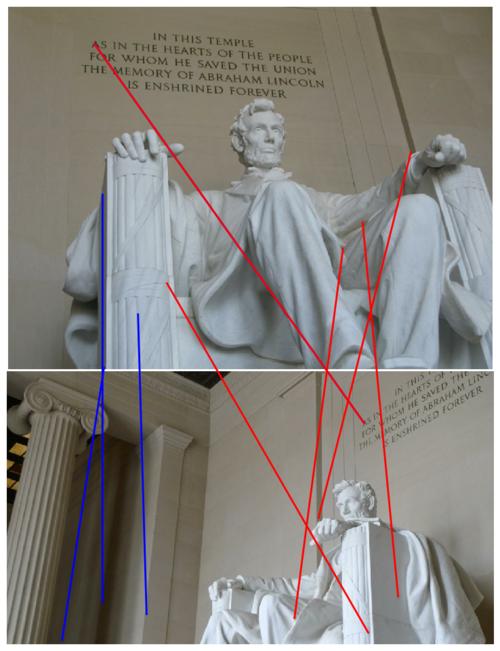
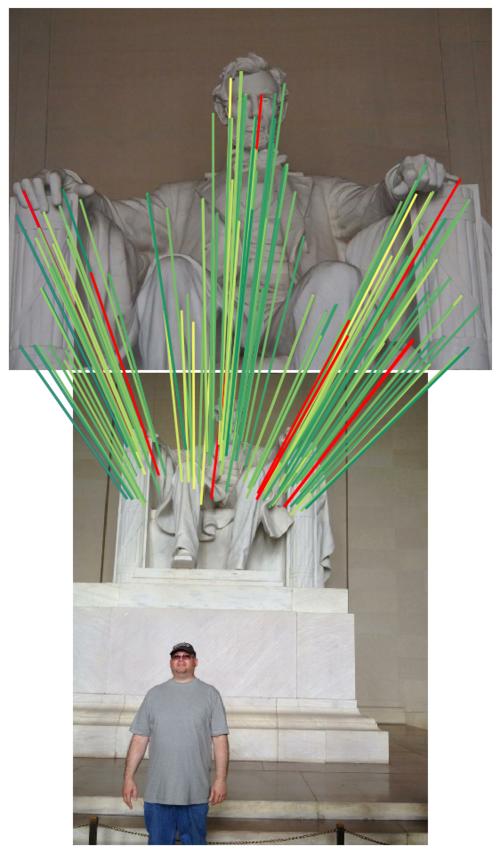
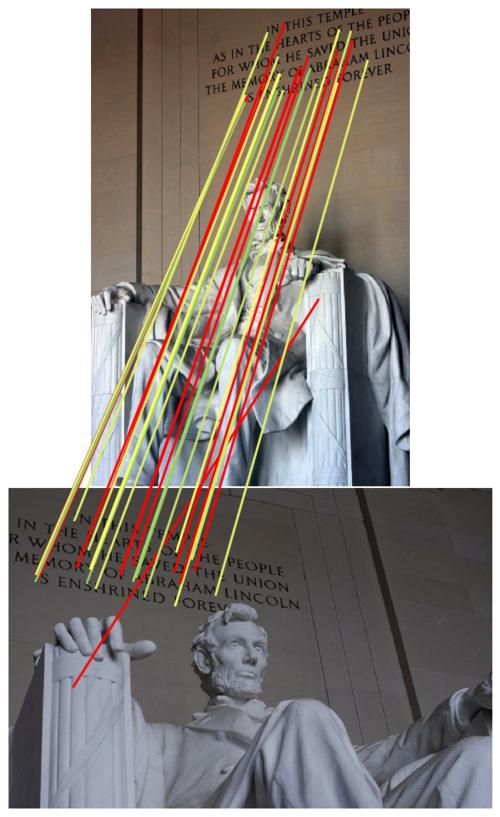
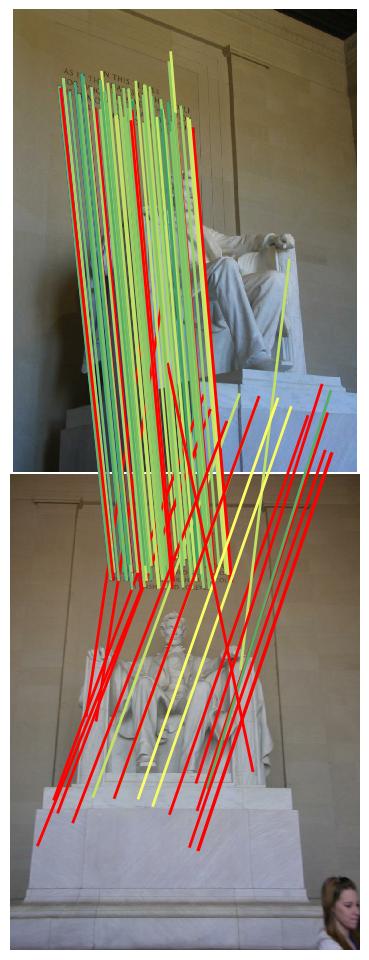
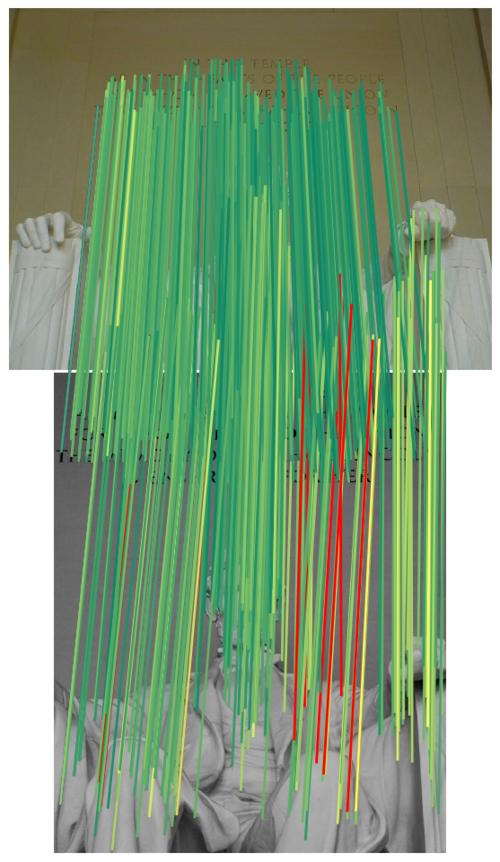
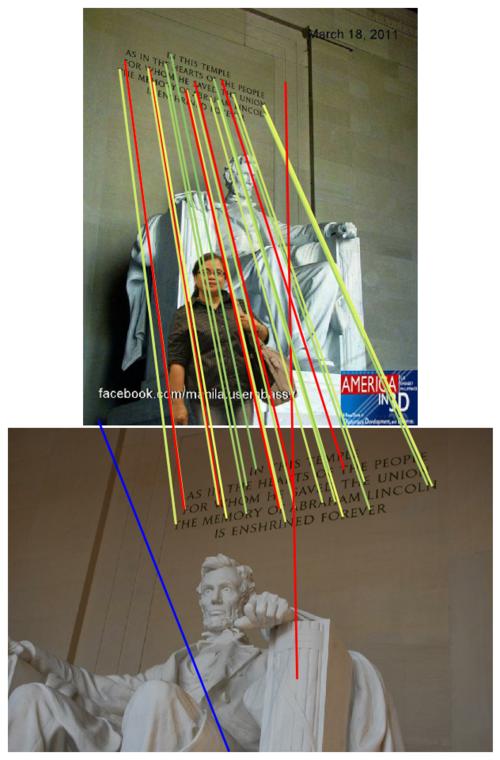
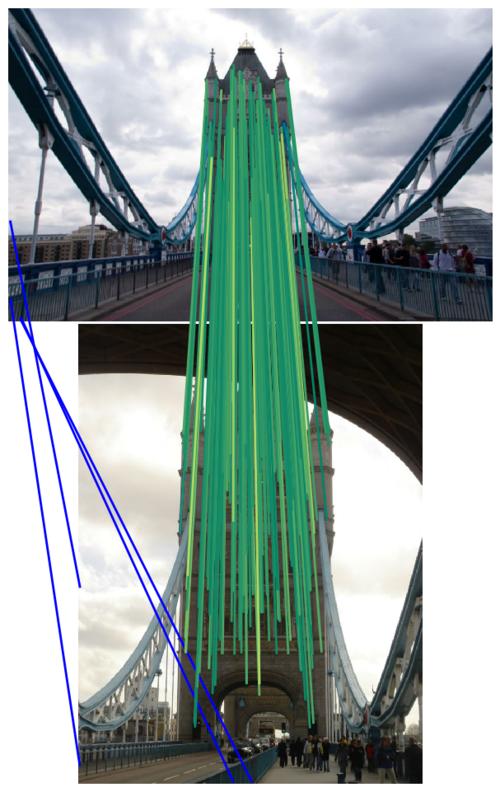
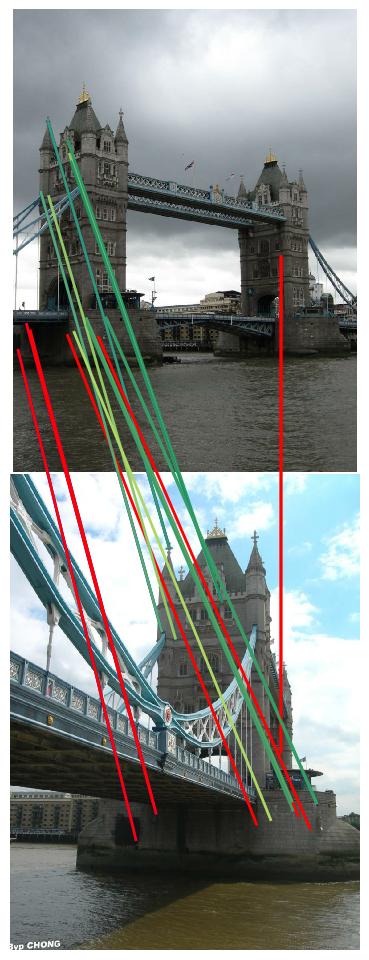
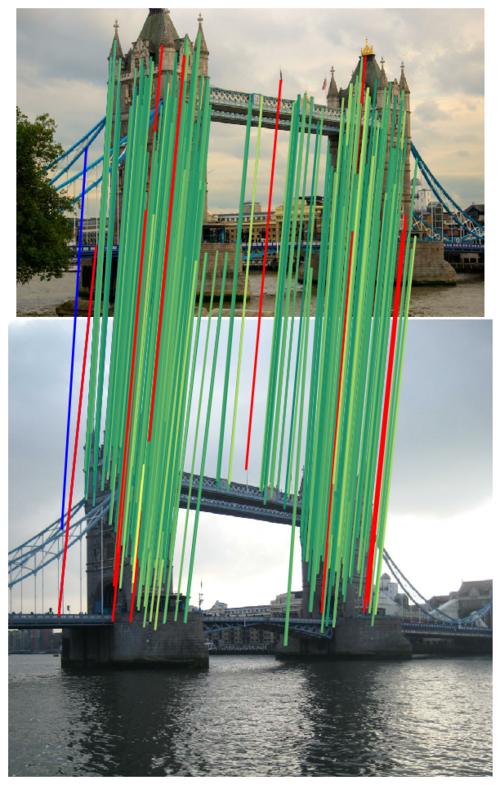
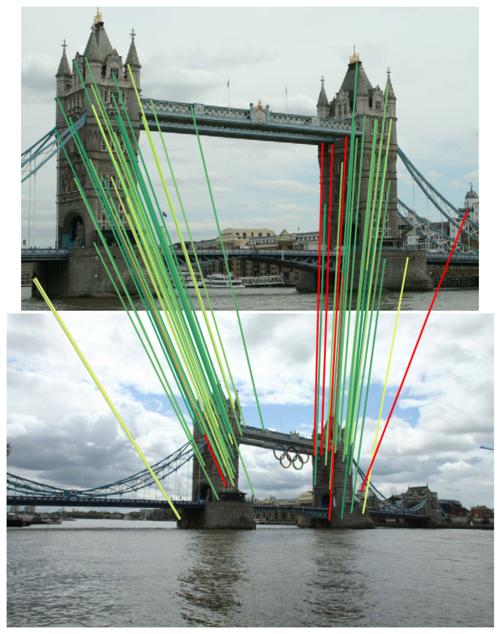
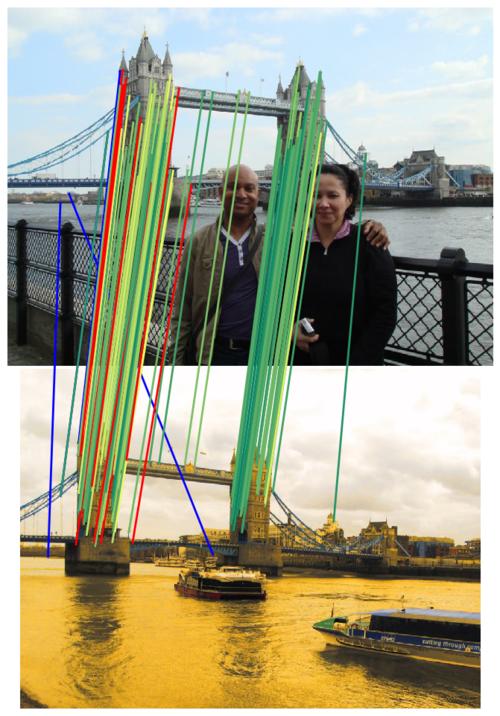
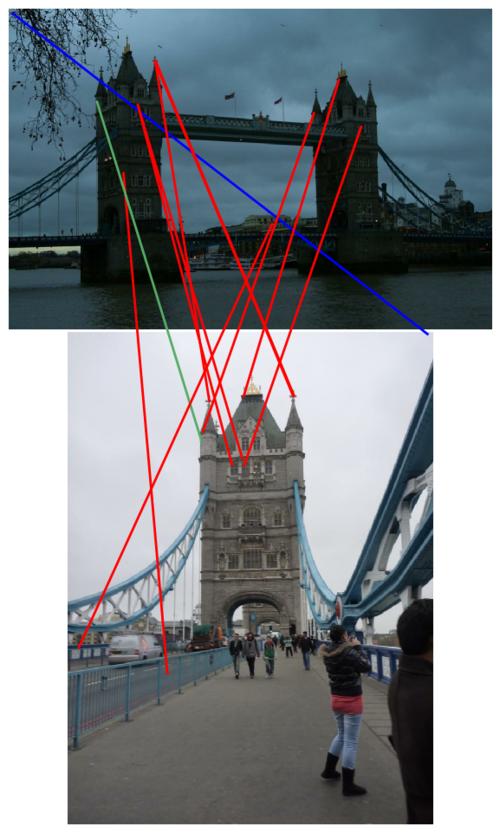
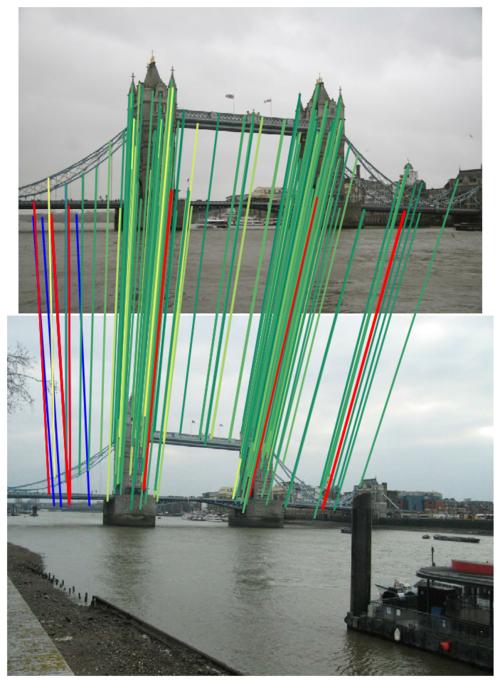
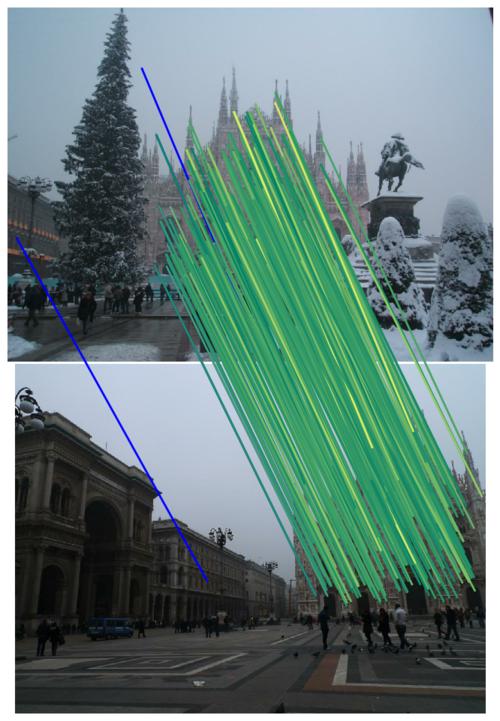
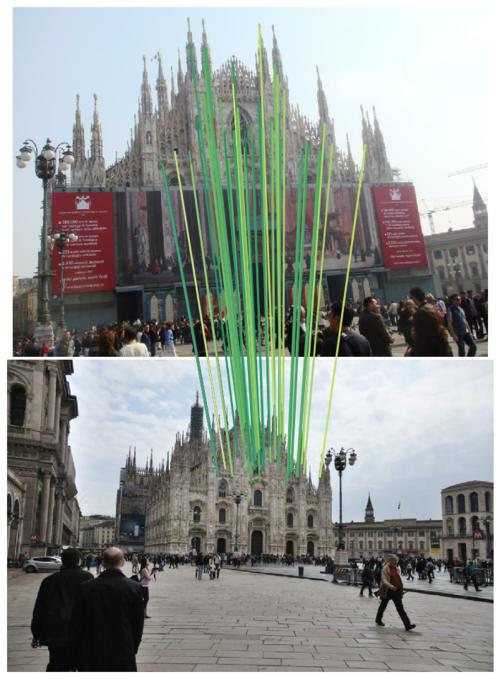
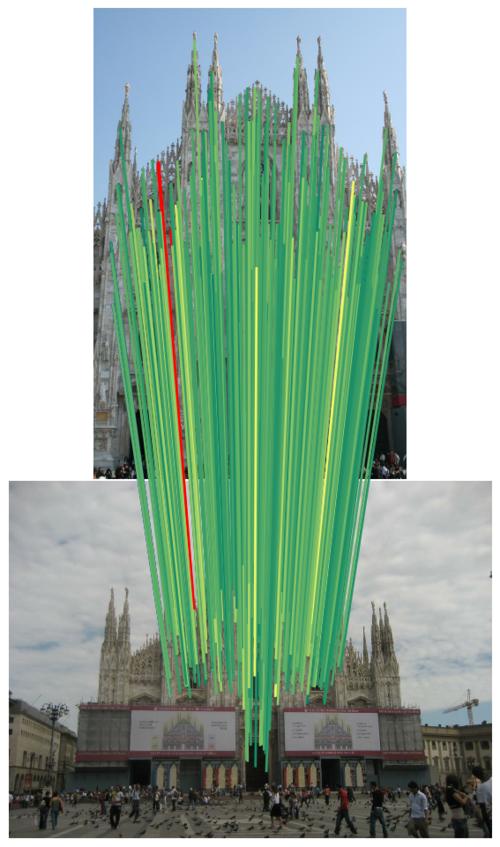
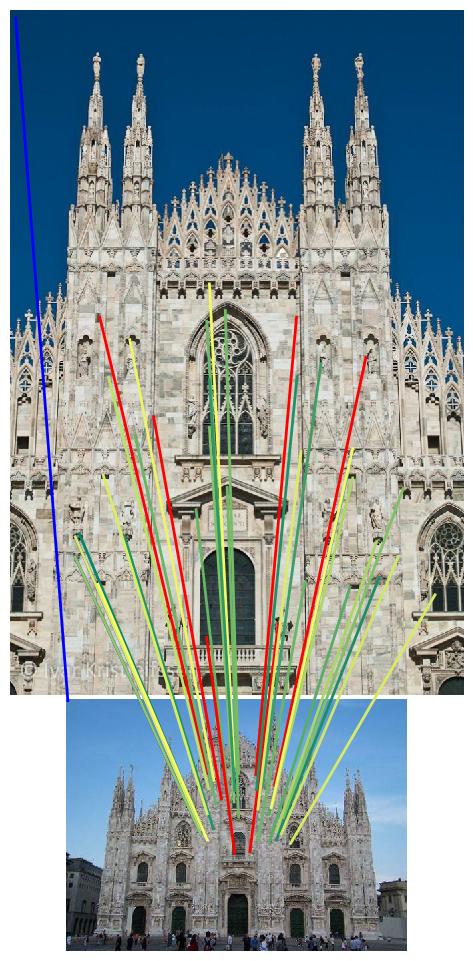
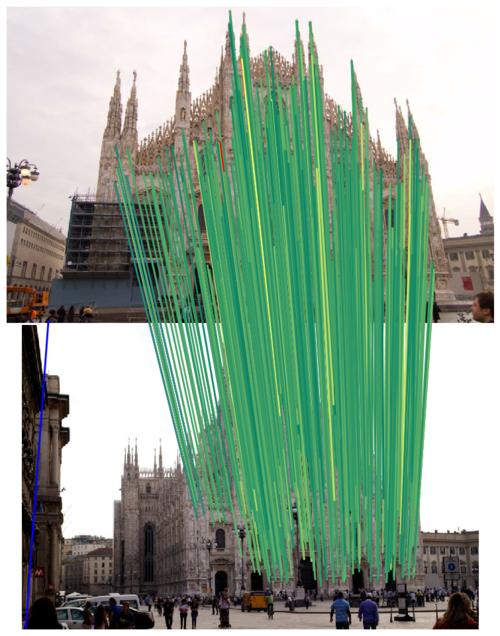
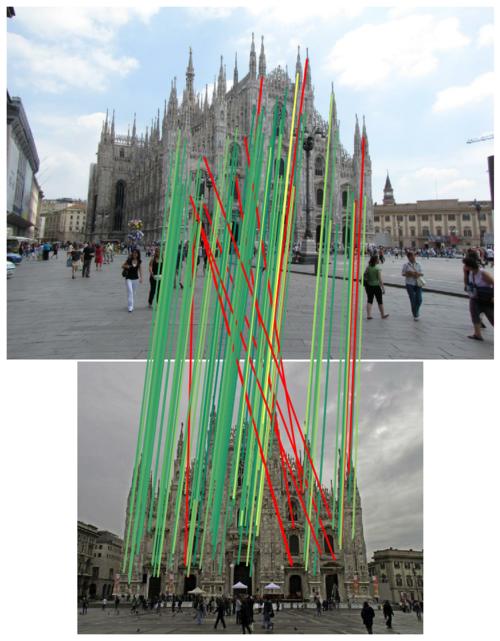
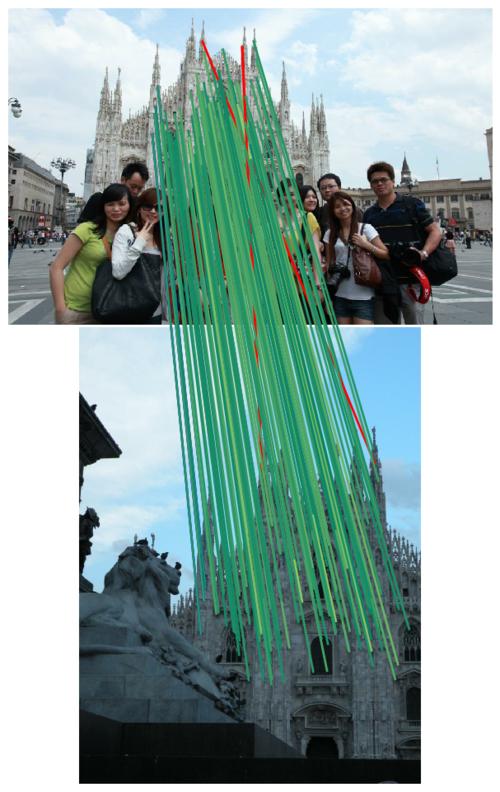
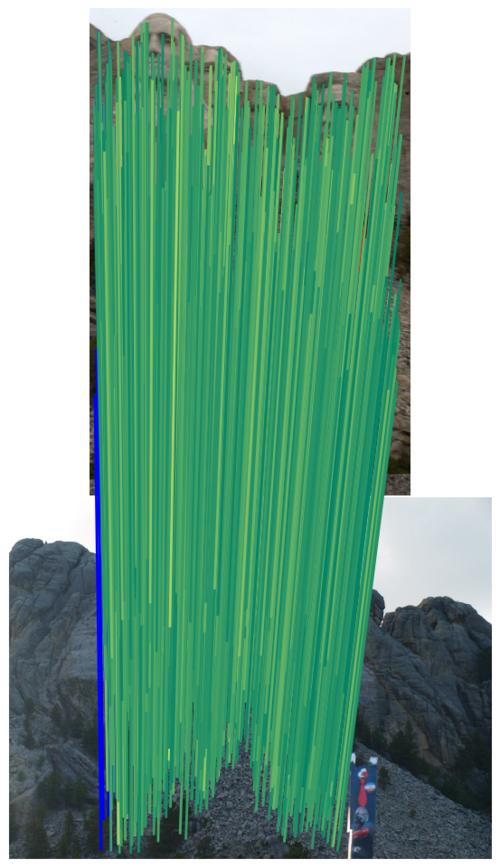
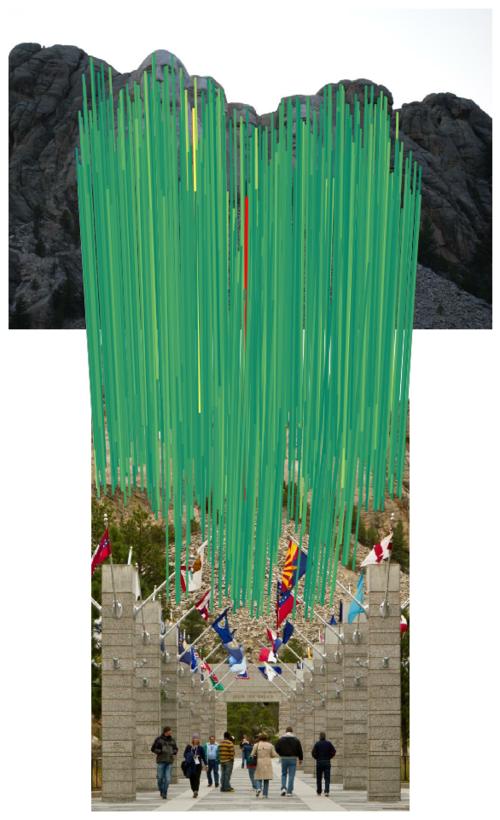
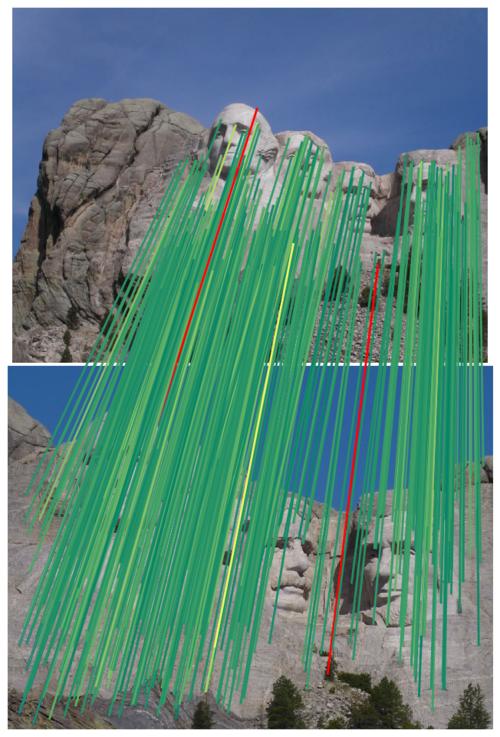
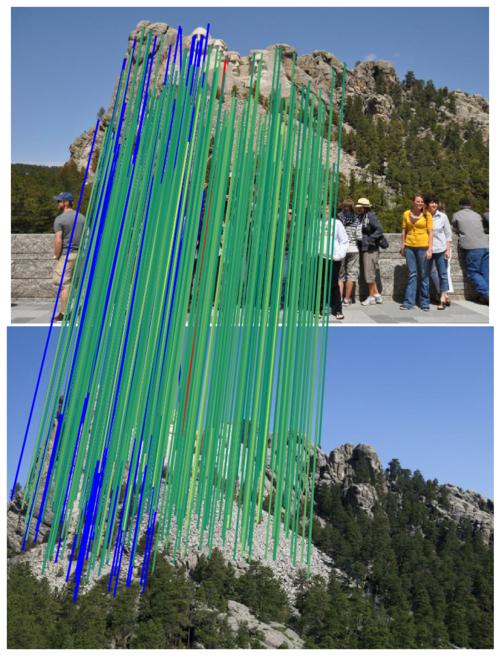
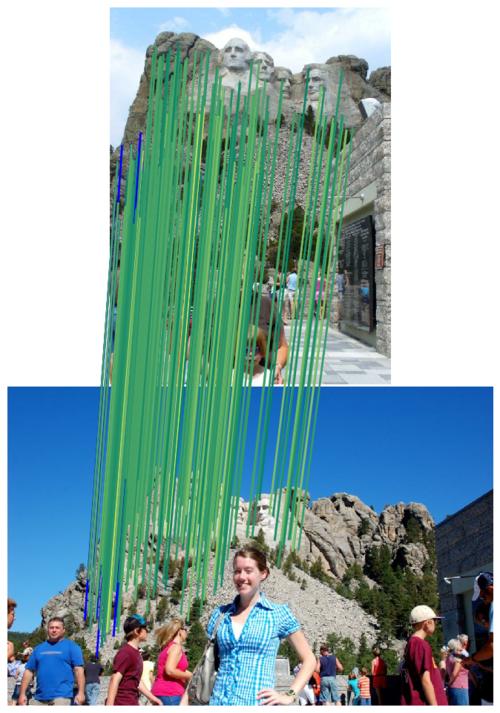
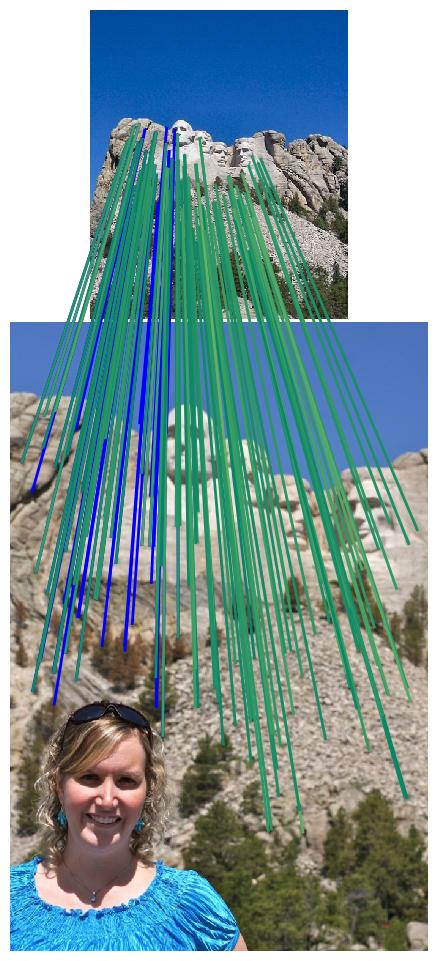
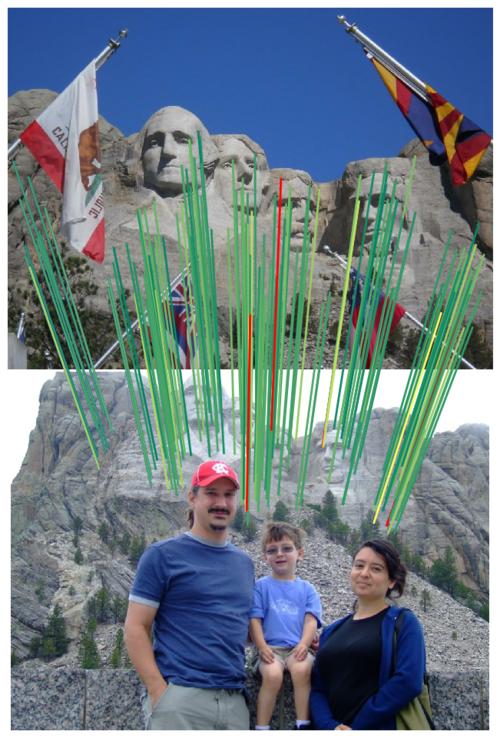
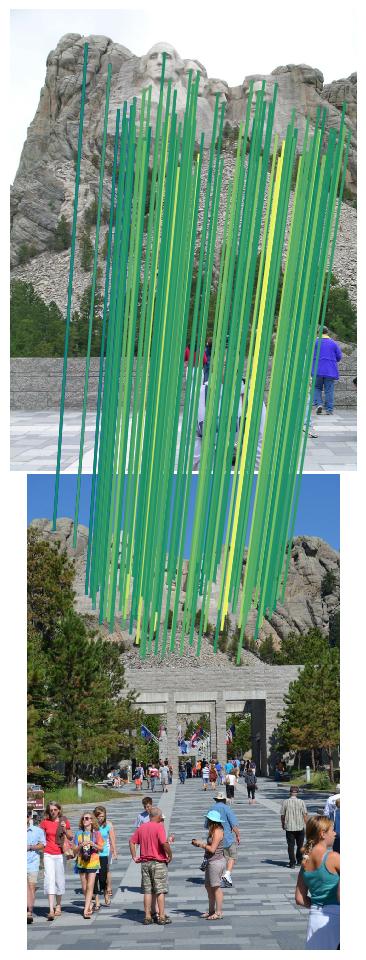
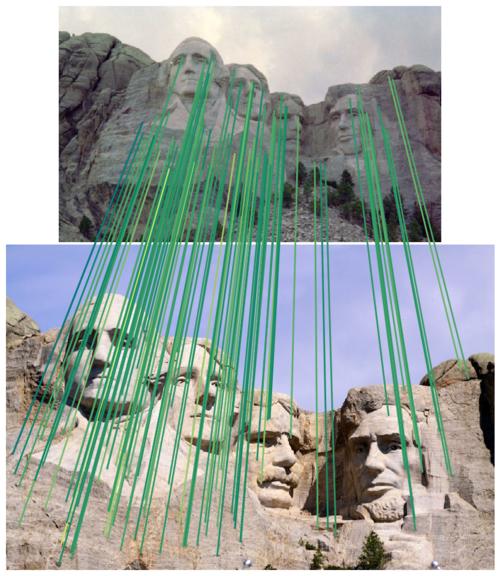
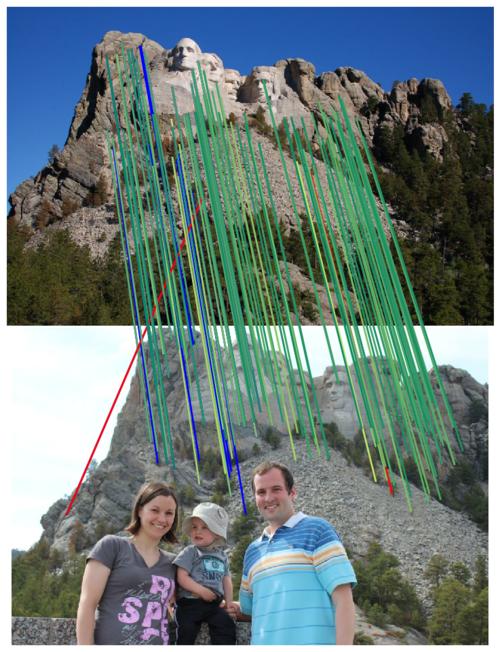
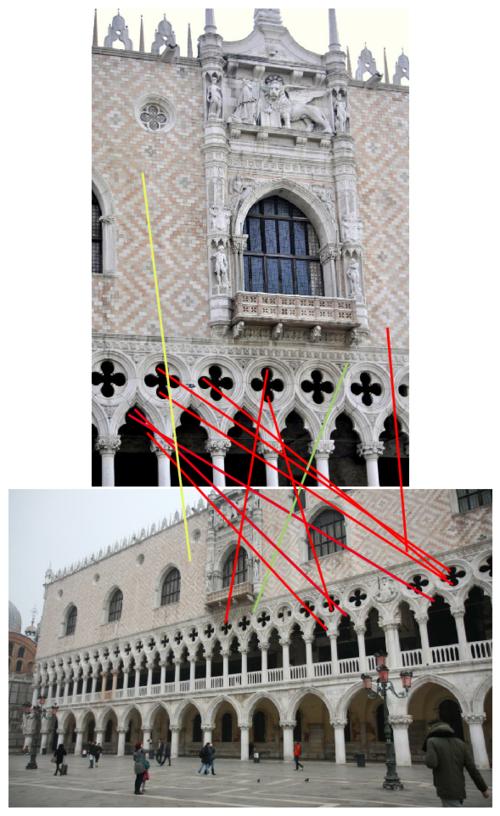
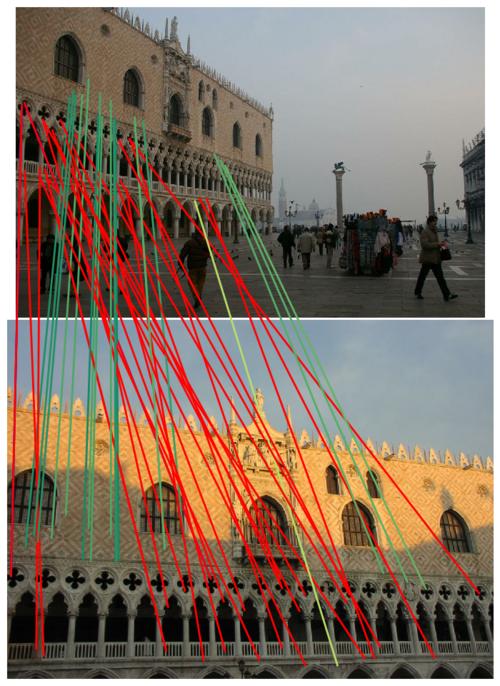
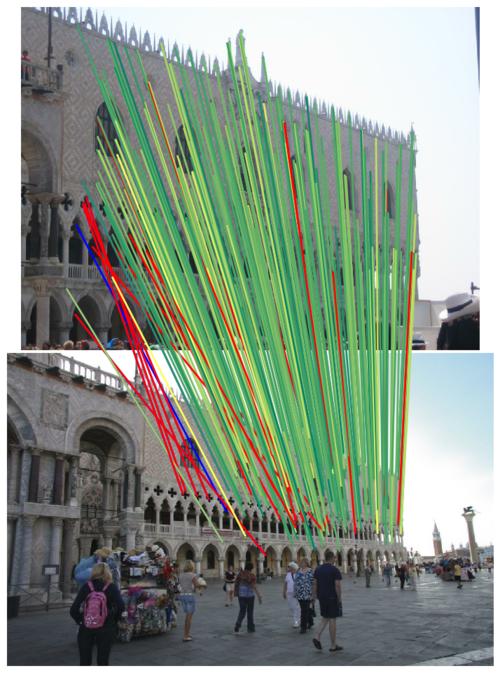
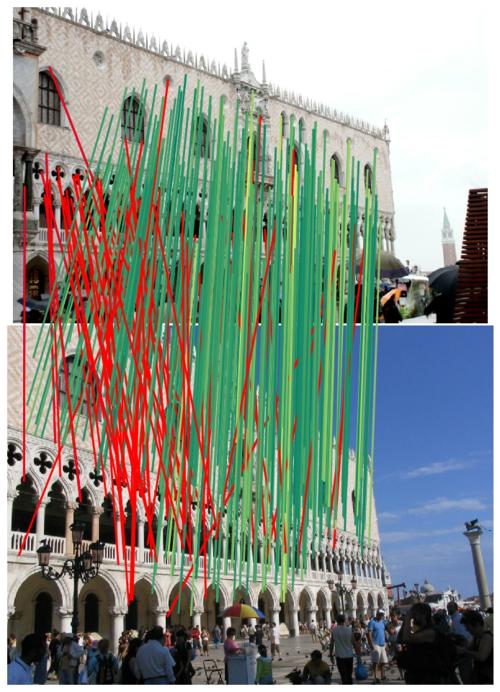
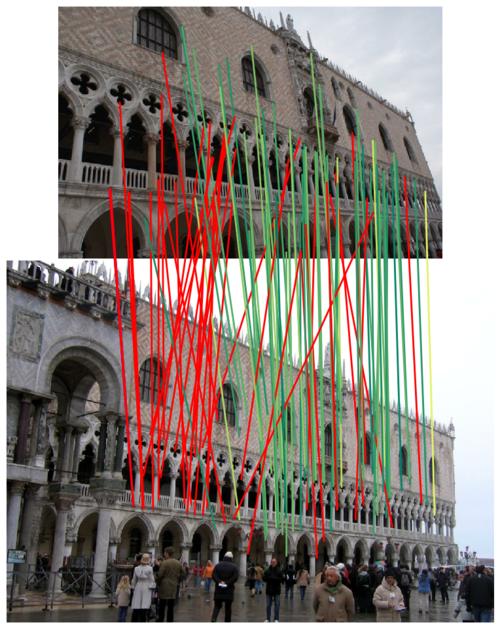
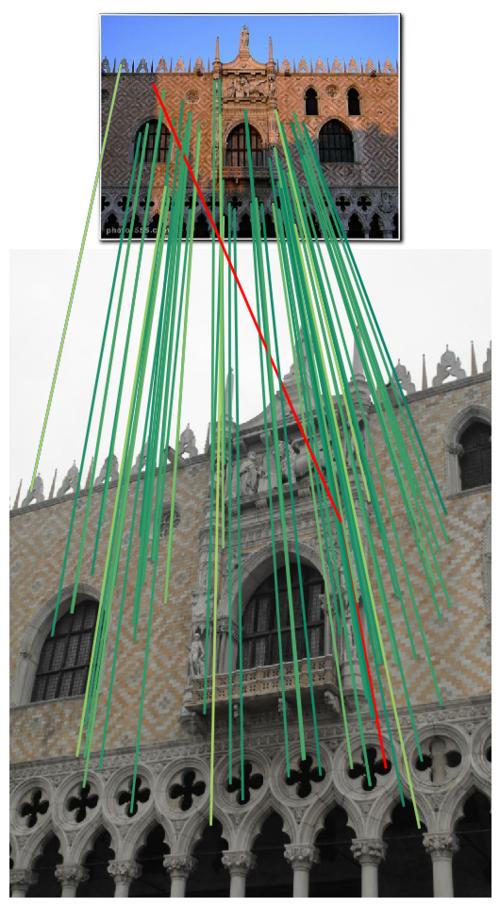
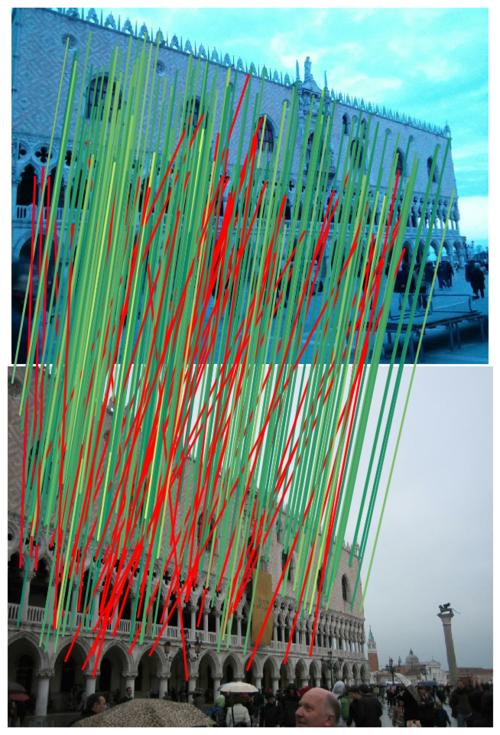
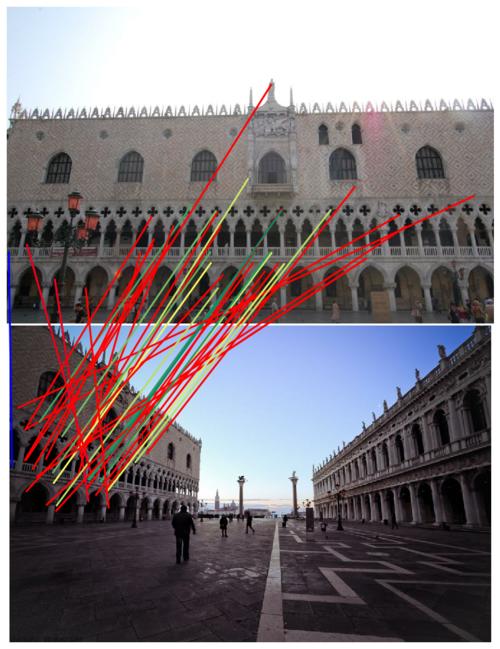
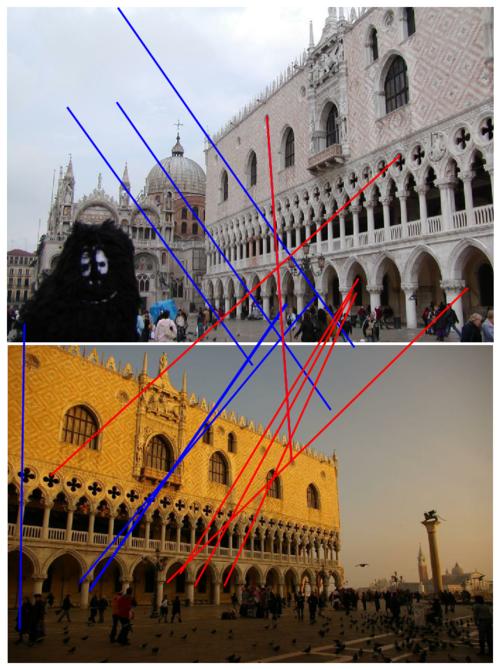
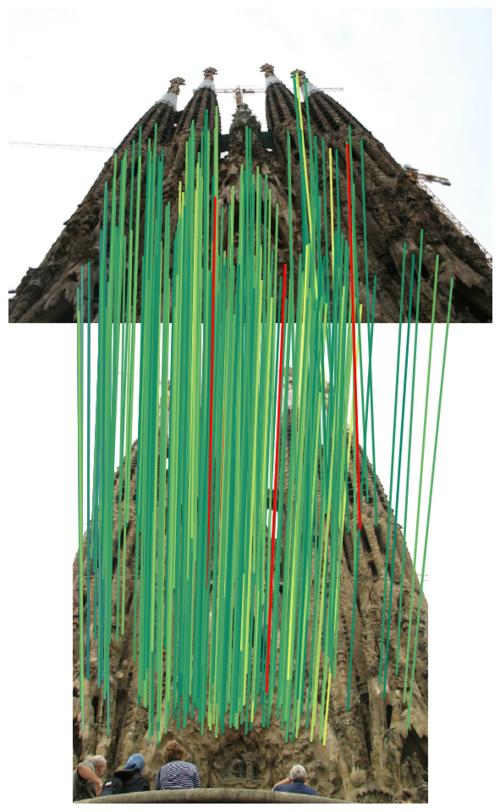
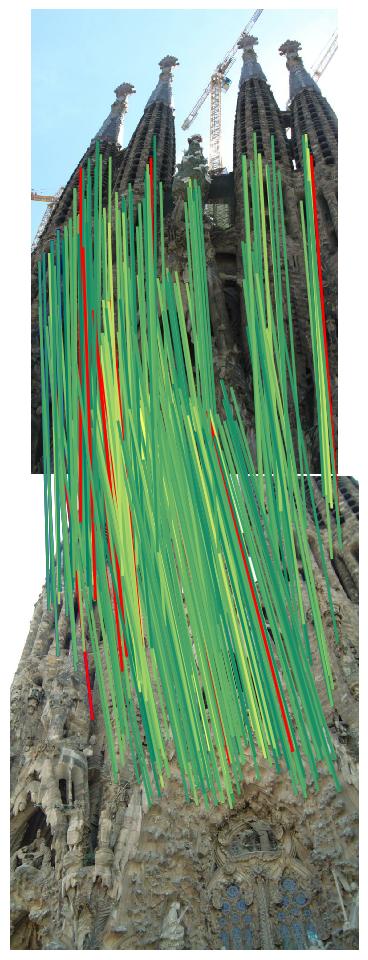
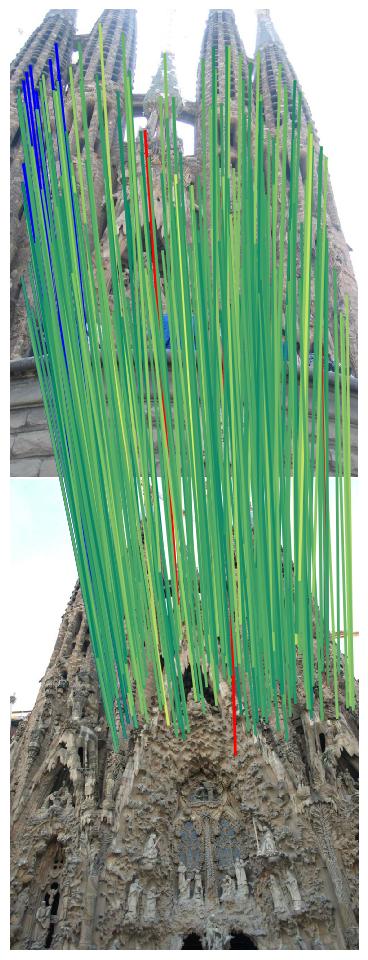
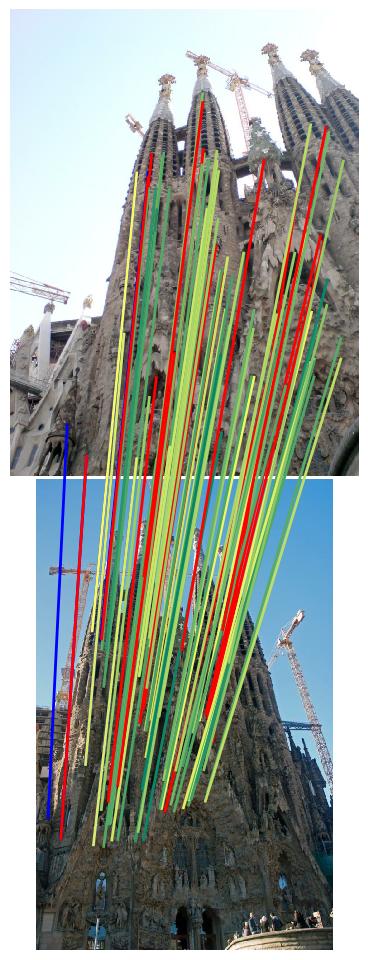
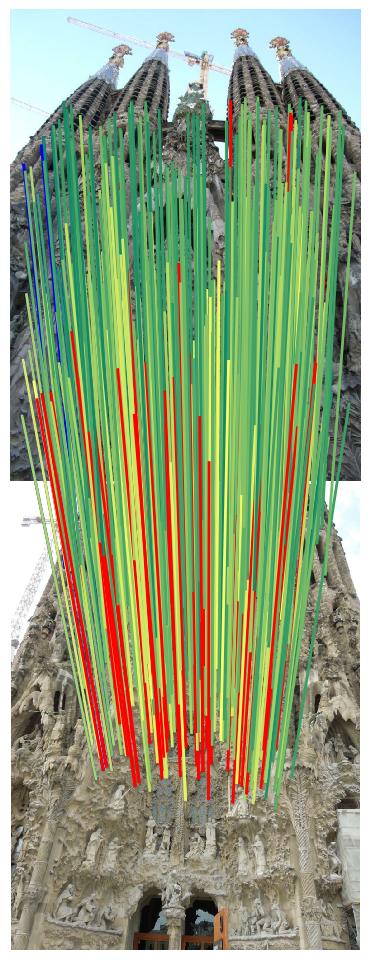
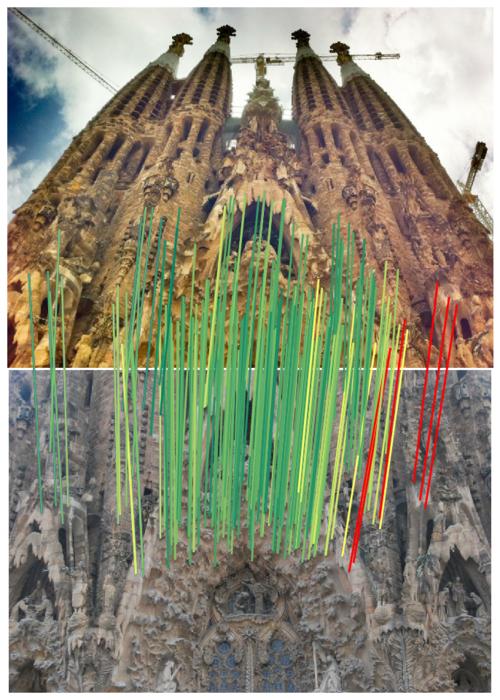
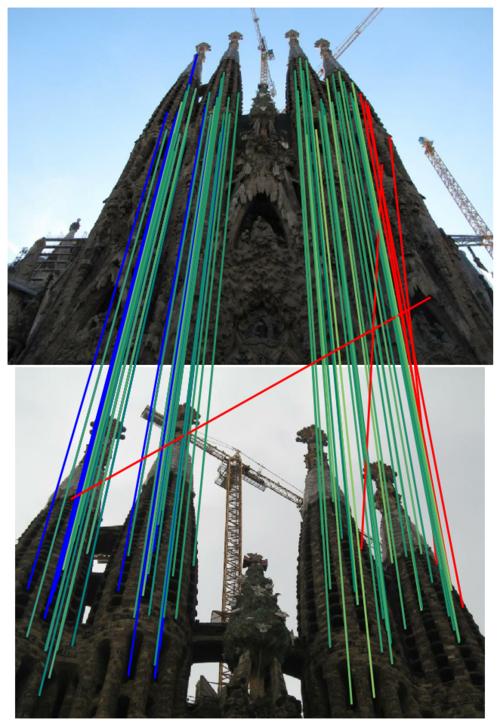
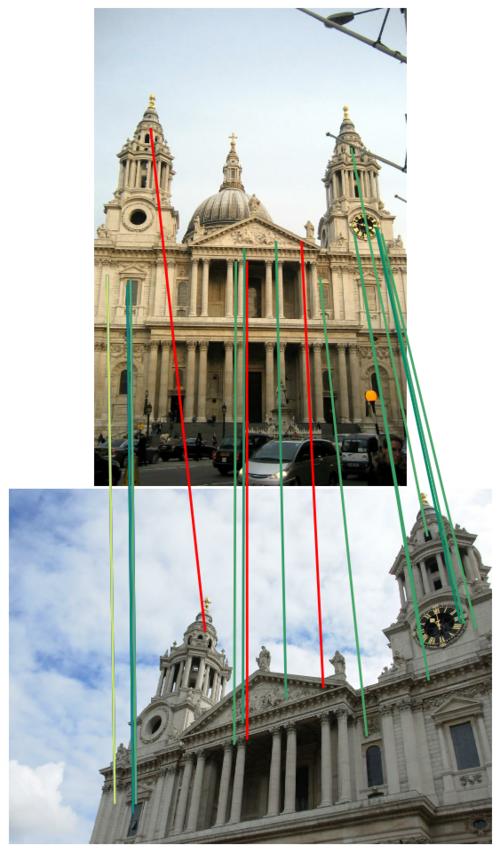
We show the inliers that survive the robust estimation loop (i.e. RANSAC), or those supplied with the submission if using custom matches, and use the depth estimates to determine whether they are correct. We draw matches above a 5-pixel error threshold in red, and those below are color-coded by their error, from 0 (green) to 5 pixels (yellow). Matches for which we do not have depth estimates are drawn in blue. Please note that the depth maps are estimates and may contain errors.
— british museum —


— florence cathedral side —
— lincoln memorial statue —
— london bridge —



— milan cathedral —



— mount rushmore —
— piazza san marco —

— sagrada familia —
— saint paul's cathedral —

Phototourism / Multiview track
mAA at 10 degrees: 0.64359 (±0.00103 over 3 run(s) / ±0.12057 over 9 scenes)
Rank (per category): 111 (of 147)
| Scene | Features | Matches (input) |
RegistrationRatio (%) | Number of Landmarks |
Track Length | ATE | mAA(50) | mAA(100) |
| bm | 7965.5 | 466.58 | 99.81 Rank: 53/147 |
2404.36 Rank: 110/147 |
4.697 Rank: 119/147 |
0.52863 Rank: 85/147 |
0.41592 (±0.00325) Rank: 83/147 |
0.56498 (±0.00491) Rank: 84/147 |
| fcs | 7865.4 | 438.55 | 96.55 Rank: 130/147 |
3247.04 Rank: 130/147 |
4.199 Rank: 123/147 |
0.30123 Rank: 131/147 |
0.68086 (±0.01740) Rank: 122/147 |
0.75151 (±0.01940) Rank: 126/147 |
| lms | 7789.9 | 422.89 | 98.56 Rank: 108/147 |
2913.88 Rank: 109/147 |
4.223 Rank: 127/147 |
0.32648 Rank: 117/147 |
0.75339 (±0.02035) Rank: 120/147 |
0.81864 (±0.02109) Rank: 126/147 |
| lb | 7966.2 | 316.19 | 98.15 Rank: 94/147 |
1735.19 Rank: 135/147 |
4.675 Rank: 61/147 |
0.49327 Rank: 61/147 |
0.60683 (±0.00593) Rank: 89/147 |
0.72202 (±0.00546) Rank: 81/147 |
| mc | 7824.2 | 433.68 | 99.44 Rank: 95/147 |
2367.86 Rank: 133/147 |
4.808 Rank: 52/147 |
0.46236 Rank: 126/147 |
0.44601 (±0.00375) Rank: 127/147 |
0.60441 (±0.00648) Rank: 121/147 |
| mr | 7807.5 | 581.50 | 94.32 Rank: 64/147 |
3281.37 Rank: 127/147 |
4.401 Rank: 25/147 |
0.54916 Rank: 117/147 |
0.38654 (±0.00203) Rank: 112/147 |
0.50569 (±0.00459) Rank: 107/147 |
| psm | 7782.9 | 262.64 | 88.46 Rank: 99/147 |
3217.30 Rank: 72/147 |
3.162 Rank: 94/147 |
0.65774 Rank: 45/147 |
0.34215 (±0.00655) Rank: 97/147 |
0.42310 (±0.00990) Rank: 96/147 |
| sf | 7870.6 | 478.57 | 94.40 Rank: 139/147 |
3764.89 Rank: 135/147 |
4.217 Rank: 117/147 |
0.36144 Rank: 122/147 |
0.62374 (±0.00160) Rank: 132/147 |
0.71608 (±0.00221) Rank: 132/147 |
| spc | 7877.1 | 346.57 | 96.34 Rank: 134/147 |
2580.30 Rank: 130/147 |
4.251 Rank: 81/147 |
0.63670 Rank: 130/147 |
0.57047 (±0.00477) Rank: 128/147 |
0.68590 (±0.00605) Rank: 130/147 |
| avg | 7861.0 | 416.35 | 96.23 Rank: 115/147 |
2834.69 Rank: 130/147 |
4.293 Rank: 88/147 |
0.47967 Rank: 117/147 |
0.53621 (±0.00176) Rank: 111/147 |
0.64359 (±0.00103) Rank: 111/147 |
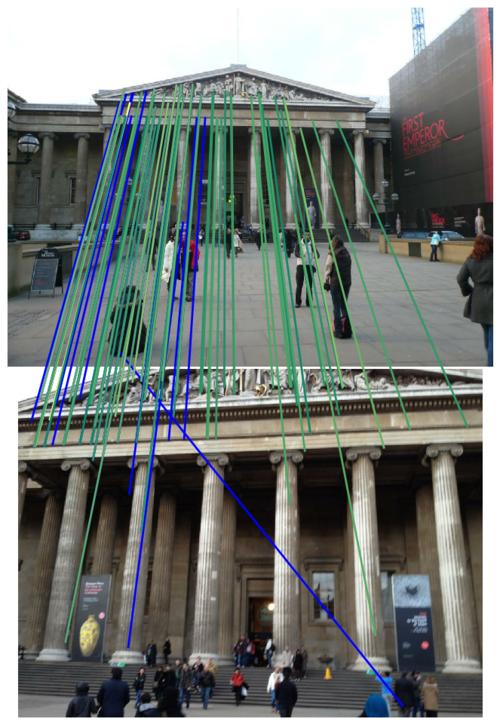
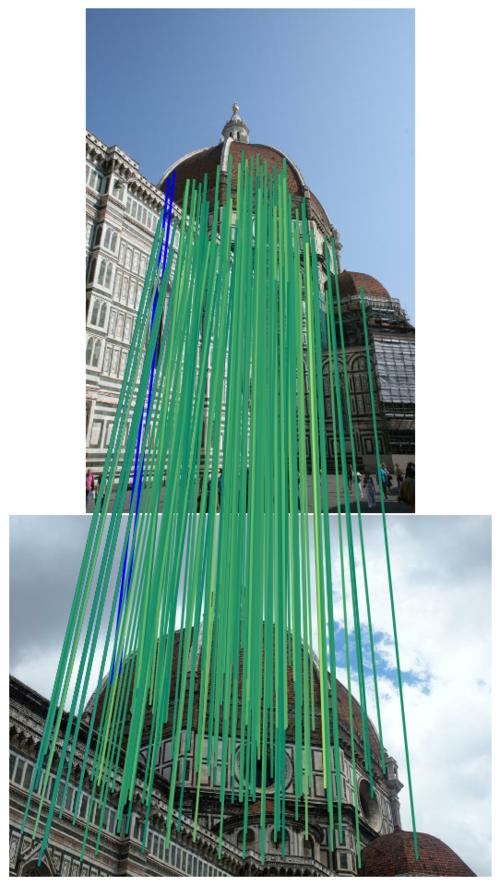
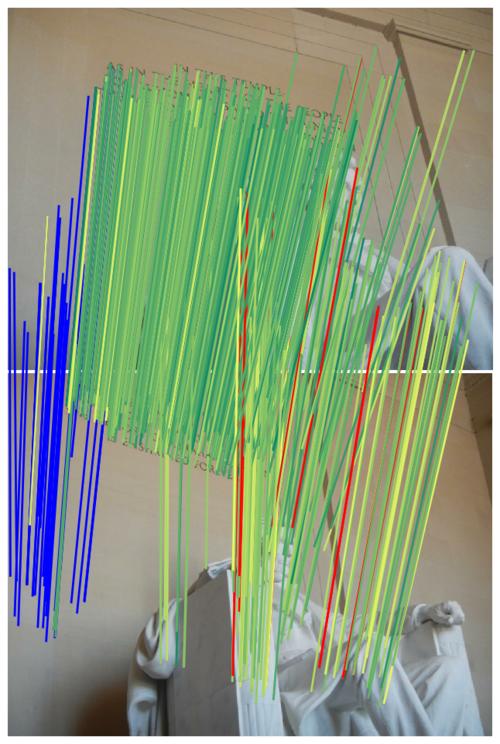
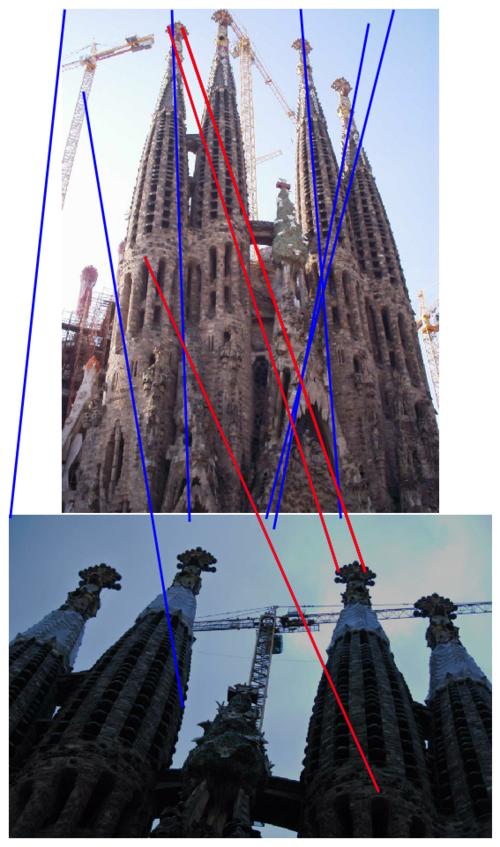
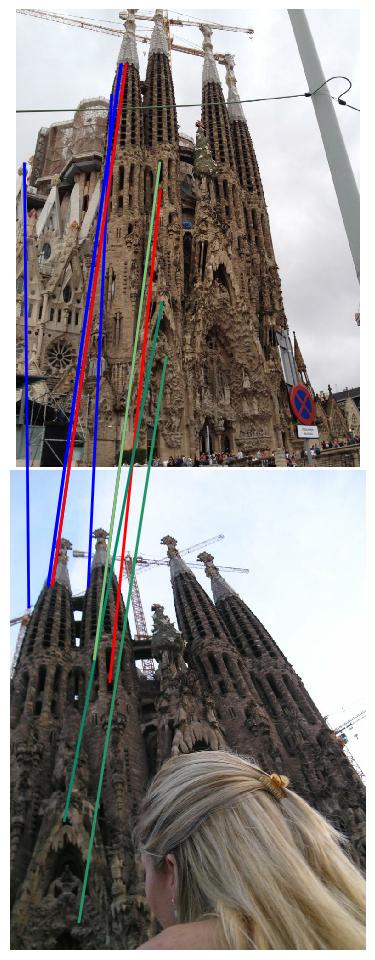
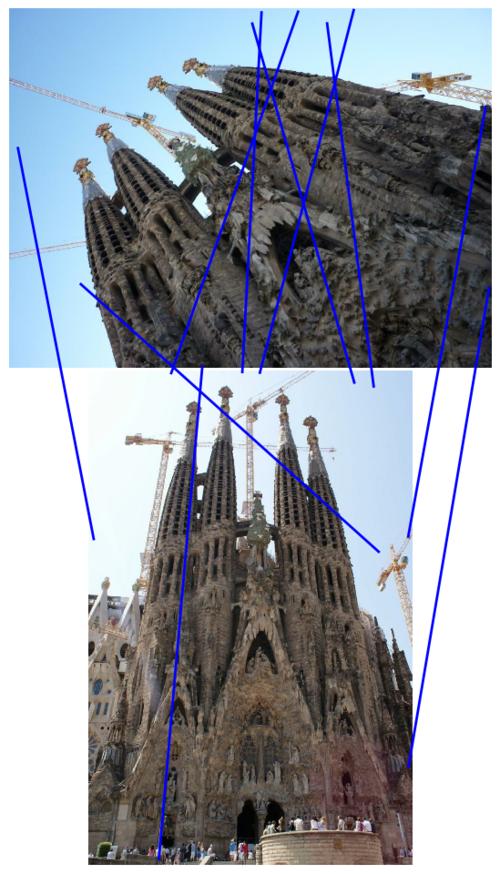
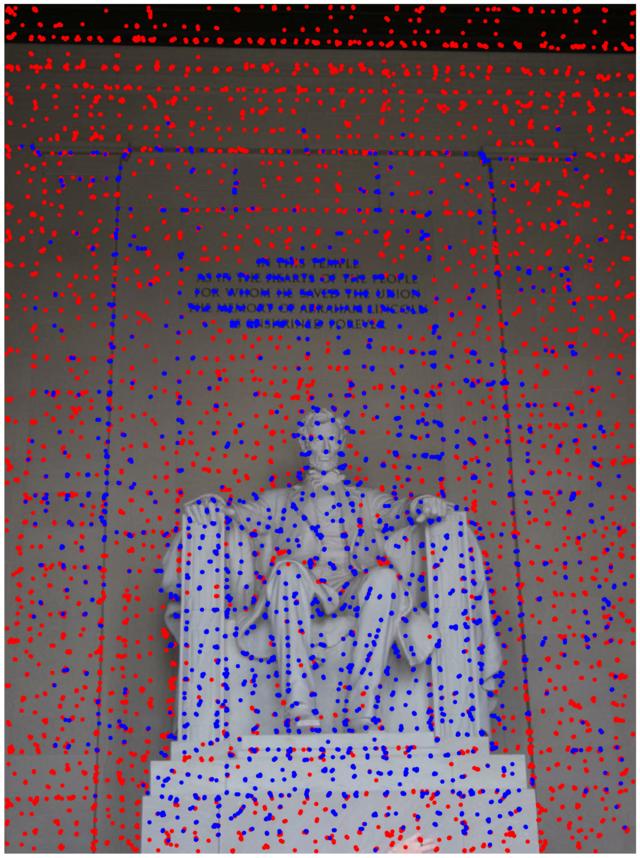
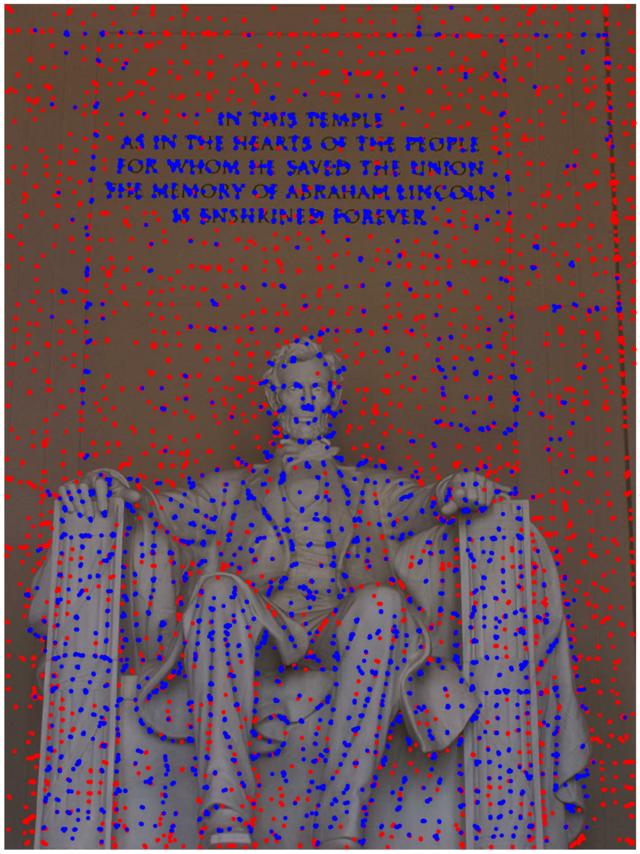
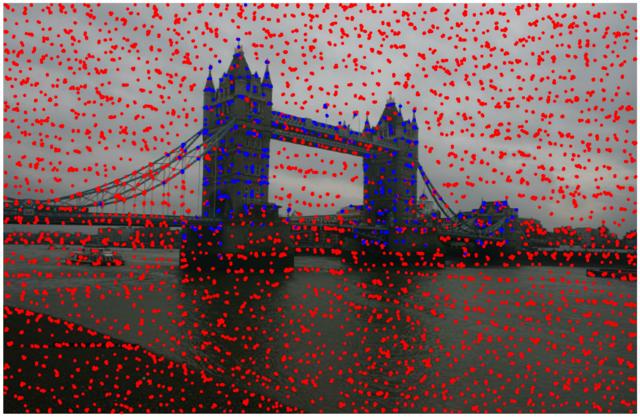
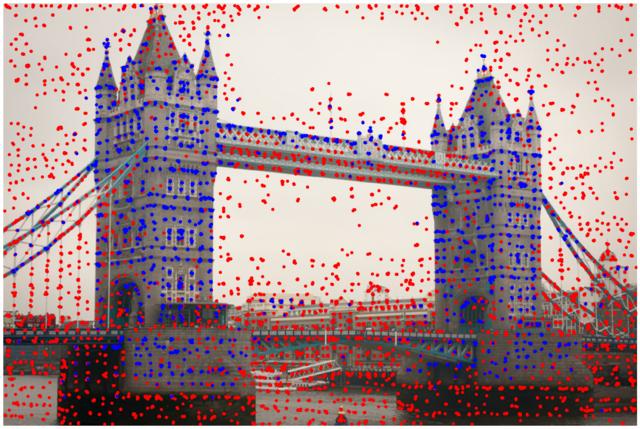
In the multi-view track we reconstruct the scene with Structure-from-Motion (Colmap) with small sets of images. We show the results for one bag of 25 images (displaying: 10). Keypoints are drawn in blue if they are part of the model, and in red otherwise.
— british museum —









— florence cathedral side —








— lincoln memorial statue —







— london bridge —






— milan cathedral —






— mount rushmore —





— piazza san marco —










— sagrada familia —


— saint paul's cathedral —









