Range Scan Registration Using Reduced Deformable Models
University of California, San Diego
Computer Graphics Forum (Proceedings of Eurographics 2009),
Munich, Germany, March 30 - April 3, 2009.
 |
||
|
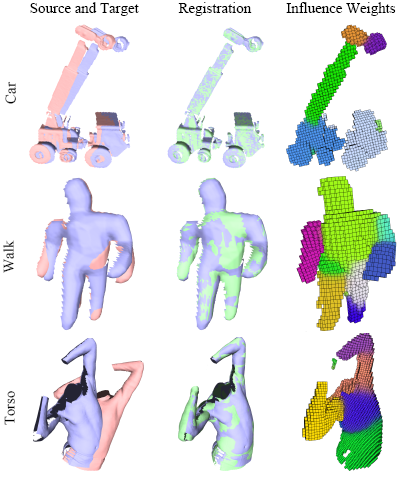
Given a pair of range scans, our technique automatically
finds the parameters of a linear blend skinning
(LBS) model to register the scans accurately.
Shown above are some registration examples from the car, walk, and body scan datasets.
The red shape is the source, the blue shape is the target, and the green
shape is the source deformed to match the target. The right column shows the skinning
weights optimized by our method using a color-coded visualization of each bone.
|
||
 |
||
|
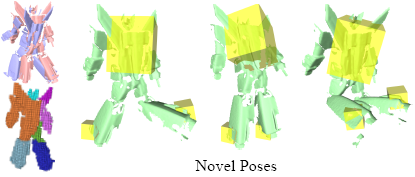
Interactive posing using our system. The weights
(bottom left) were optimized by registering two scans (top
left). The user can interactively select and drag constraints
on the shape (shown as boxes) to generate a novel pose.
|
||
Abstract
We present an unsupervised method for registering range scans of deforming, articulated shapes. The key idea is to model the motion of the underlying object using a reduced deformable model. We use a linear skinning model for its simplicity and represent the weight functions on a regular grid localized to the surface geometry. This decouples the deformation model from the surface representation and allows us to deal with the severe occlusion and missing data that is inherent in range scan data. We formulate the registration problem using an objective function that enforces close alignment of the 3D data and includes an intuitive notion of joints. This leads to an optimization problem that we solve using an efficient EM-type algorithm. With our algorithm we obtain smooth deformations that accurately register pairs of range scans with significant motion and occlusion. The main advantages of our approach are that it does not require user specified markers, a template, nor manual segmentation of the surface geometry into rigid parts.
Downloads
Paper
[ Paper ] (8.8 MB Adobe PDF)
[ BibTex ]
Video
[ Video ] (23.9 MB Xvid/AVI)