|
Overview of Research Projects
Laboratory for Computational Intelligence
Computer Science Department
University of British Columbia
Following are summaries of a few research projects prior to 2015. See
publications
for papers on many other projects.
|
|
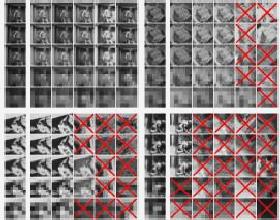
FLANN: Fast Library for Approximate Nearest Neighbors
(Marius Muja and David Lowe)
The most time consuming part of performing object recognition or
machine learning in large datasets is often the need to find the
closest matches for high-dimensional vectors among millions of similar
vectors. There are usually no exact algorithms for solving this
problem faster than linear search, but linear search is much too slow
for many applications. Fortunately, it is possible to use approximate
algorithms that sometimes return a slightly less than optimal answer
but can be thousands of times faster. We have implemented the best
known previous algorithms for approximate nearest neighbor search and
developed our own improved methods. The optimal choice of algorithm
depends on the problem, so we have also developed an automated
algorithm configuration system that determines the best algorithm and
parameters for particular data and accuracy requirements. This
software, FLANN, has been released as open source. It requires only a
few library calls in Python, Matlab, or C++ to select and apply the
best algorithm for any dataset.
FLANN GitHub page
with source code
|
|
|
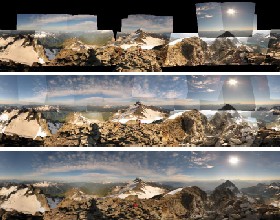
Autostitch: Automated panorama creation
(Matthew Brown and David Lowe)
An ordinary digital camera can be used to create wide-angle
high-resolution images by stitching many images together into seamless
panoramas. However, previous methods for panorama creation required
complex user interfaces or required that images be taken in a specific
linear sequence with fixed focal lengths and exposure settings. We
have used local invariant features to allow panorama matching to be
fully automated without assuming any ordering of the images or any
restriction on focal lengths, orientations, or exposures. The
matching time is linear in the number of images, so all panoramas can
be automatically detected in large sets of images. We have also
developed approaches for seamlessly blending images even when
illumination changes or there are small misregistrations.
Autostitch research site
|
|
|
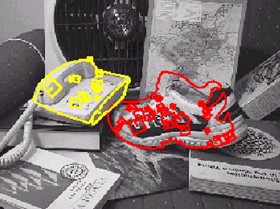
SIFT: Matching with local invariant features
Local invariant features allow us to efficiently match small portions
of cluttered images under arbitrary rotations, scalings, change of
brightness and contrast, and other transformations. The idea is to break
the image into many small overlapping pieces of varying size, each of which is
described in a manner invariant to the possible transformations. Then
each part can be individually matched, and the matching pieces checked
for consistency. It may sound like a lot of computation, but it can all
be done in a fraction of a second on an ordinary computer.
This particular approach is called
SIFT (for Scale-Invariant Feature Transform) as it transforms each
local piece of an image into coordinates that are independent of image
scale and orientation.
More information and demo
|

|
|
Augmented reality in natural scenes
(Iryna Gordon and David Lowe)
Augmented reality means that we can take video images of the natural
world and superimpose synthetic objects with accurate 3D registration
so that they appear to be part of the scene. Applications include any
situation in which it is useful to add information to a scene, such as
for the film industry, tourism, heads-up automobile displays, or
surgical visualization. We have developed an approach that can
operate without markers in natural scenes by matching local invariant
features. It begins with a few images of each scene taken from
different viewpoints, which are used to automatically construct
accurate 3D models. The models can then be reliably recognized in
subsequent images and precisely localized and tracked.
More information.
|
[Return to home page]
|