|
Instructor: David Lowe
January 2014
Due Date: Tuesday, January 28, 2014.
The purpose of this assignment is to learn how to implement some basic
methods for correlation-based stereo matching and to gain
experience with optimizing system parameters using real world data.
The assignment
- We will assume that our stereo images have been rectified
so that corresponding epipolar points are along the same scan lines
(image rows). The first step will be to implement some Matlab (or Python)
code that performs normalized cross correlation to compare a square window
around each pixel in the left image against windows at a range of horizontal
disparities in the right image. See the paper by Pascal Fua for a
description of this approach. This should generate a disparity image
that can be displayed and used for further stages. Try window sizes
of 3x3, 5x5, and 7x7, and include sample disparity images
for these in your report.
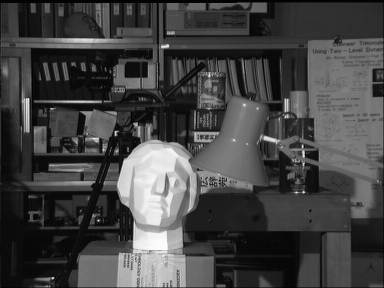
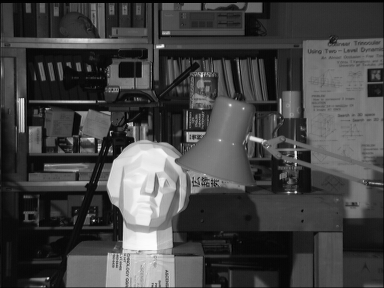
We will use the following pair of
stereo images from Tsukuba University:
imL.jpg and
imR.jpg.
You can download these by right-clicking in your browser.
These images are in a lightly compressed JPEG format, which will load
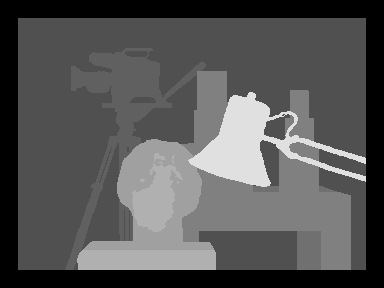
easily into Matlab. In addition, there is a ground truth disparity
image in which the correct disparities have been determined by hand for
the left image:
trueL.jpg.
For this pair, you should search over a disparity range of [0,15]. (HINT:
its easy to get the ordering wrong, but you can debug this by
switching the images and see which order gives the best result).
For the ground truth disparity image, the
disparities have been multiplied by 16
to make them suitable for display, so you should do the same.
- As a second step, write a scoring function that computes the
fraction of correct pixels in your result that are within 1 disparity
value (equivalent to 16 values in the scaled image) of ground truth.
Which window size produces the largest fraction of correct pixels?
- Try at least one additional method to improve the accuracy of
your stereo system. For example, you can try the validity check in
the Fua paper, in which images are matched in both directions, and
pixels are marked invalid when the directions disagree. You can also
mark pixels invalid if the NCC score is similar for multiple
disparities. Then you can fill invalid pixels with estimated values
by setting them to the disparity of the nearest valid pixel. Other
ideas include using color images (the color versions are available on
the Scharstein & Szeliski web site) or using multi-scale windows such
as described in the Fua paper. Clearly explain your method in your
report and describe its effect on the final score.
Matlab resources
-
Brief Introduction to Matlab for Computer Vision.
-
Ian Mitchel's Matlab Resources.
Deliverables
Hand in a copy of your commented code, disparity images showing
results at various stages of computation, and a written description of
what you did and the conclusions you reach (no more than 2 pages of
written description).
|
{kind=link}
{kind=link}
{kind=link}