|
Home
People
Robots
Projects
Publications
Contact
|
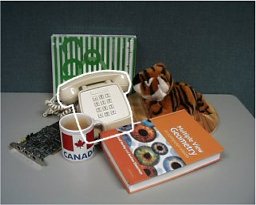
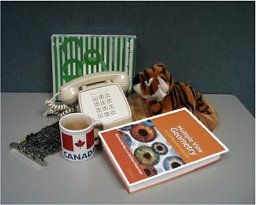
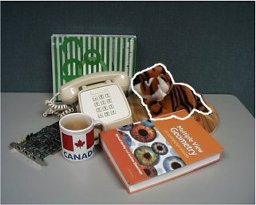
This project developed a family of invariant features
formed from combinations of interest point groups. By choosing groups of
2, 3 or 4 interest points and using them to define a local coordinate frame,
features which are invariant under similarities, affinities and homographies
can be formed. We have applied this technique to matching images for object
recognition, panoramic imaging and fundamental matrix estimation.
Object recognition using Invariant Features
from Interest Point Groups
|
|
|