The UBC Active Measurement Facility (ACME)
ACME is an integrated robotic facility designed to acquire a rich set of measurements from objects of moderate size, for building computational models. ACME can acquire a large number of registered measurements including shape, reflectance, sound, and contact forces.
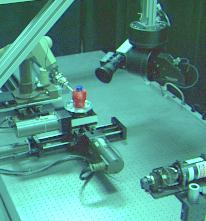
ACME can provide precise motions of a test object and acquire range measurements with a laser range finder. It can also position a 3 CCD color video camera, microphones, and other sensors around the object with 5 degrees of freedom, and probe the test object with a robot arm equipped with a force/torque sensor. See the Facility page for more details.
ACME is also a telerobotic system with fifteen degrees of freedom, designed to be controlled from any location on the Internet. Everything in ACME is under computer control, via small Java classes called Experiments. We have also developed an extensive teleprogramming system for ACME.
Funding:
ACME was developed with initial funding from IRIS and an NSERC equipment grant, and ongoing funding from the IRIS NCE Project "Reality-based Modeling and Simulation of Physical Systems in Virtual Environments.Selected References:
D. K. Pai, K. van den Doel, D. L. James, J. Lang, J. E. Lloyd, J. L. Richmond, S. H. Yau, ``Scanning Physical Interaction Behavior of 3D Objects,'' in Computer Graphics (ACM SIGGRAPH 2001 Conference Proceedings), August 2001. [pdf 1.5M], [mpg 16M]D. K. Pai, J. Lang, J. E. Lloyd, and R. J. Woodham. ``ACME, A Telerobotic Active Measurement Facility.'' in Proceedings of the Sixth International Symposium on Experimental Robotics, Sydney, Australia, March 1999. To appear as Experimental Robots VI, Springer-Verlag. [pdf 336k] [gziped postscript 1.4M]