About
CALTag is a self-identifying marker pattern that can be accurately and automatically detected in images. Detection is robust to occlusions, uneven illumination and moderate lens distortion.

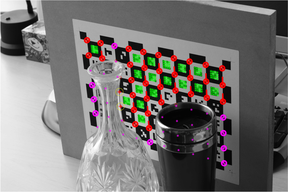
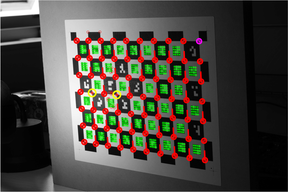
Chequerboards are often used for camera calibration, with the interior saddle points providing the necessary point correspondences. Manual identification of these points is at best tedious, and at worst, infeasible and unreliable (especially when calibrating large arrays of cameras). By augmenting the pattern with self-identifying binary codes, much like the excellent ARTag system, this process can be automated.
Whereas ARTag has highly robust error detection and correction, it suffers from licence restrictions, and a somewhat inaccurate corner detector. CALTag employs rudimentary error detection, but the code is free to use and modify, and it detects corners using a very accurate saddle-point finder.